Zegar śmigłowy na Atmega8. POV - zegar śmigłowy DIY zegar śmigłowy na schematach pic16f628a
Cześć wszystkim! Chciałbym zwrócić uwagę na prosty zegar śmigłowy, który zamontowałem na kontrolerze Atmega8. Są wykonane z łatwo dostępnych części i są łatwe w replikacji i produkcji. Tyle, że do flashowania sterownika zegara i panelu sterowania potrzebny jest programista.
W podstawie zegara zastosowano zwykły wentylator 120 mm (chłodzenie). Do tego zegara można zastosować dowolne wentylatory, zarówno zgodnie z ruchem wskazówek zegara, jak i przeciwnie do ruchu wskazówek zegara, ponieważ przy składaniu tego zegara zmodyfikowałem trochę program i programowo przełączyłem wyświetlanie symboli z pilota.
Sam obwód zegara jest dość prosty i zmontowany na mikrokontrolerze Atmega8, do synchronizacji jego działania zastosowano kwarc zegara o częstotliwości 32768 Hz.
Zegar zasilany jest z cewki odbiorczej, do której energia przekazywana jest z generatora z cewką nadawczą. Obie te cewki tworzą transformator powietrzny.

Nie było szczególnych problemów z obwodem i konstrukcją generatora, ponieważ zastosowano generator z kuli plazmowej.

Generator jest montowany na wspólnym mikroukładzie TL494 i umożliwia zmianę szerokości i częstotliwości impulsów wyjściowych w szerokim zakresie.
Nawet przy centymetrowej przerwie między cewkami napięcie jest wystarczające do uruchomienia zegara. Wystarczy wziąć pod uwagę, że im większa szczelina między cewkami, tym większa musi być szerokość impulsu i odpowiednio wzrasta pobór prądu ze źródła.

Włączając generator po raz pierwszy, ustaw szerokość impulsu (współczynnik wypełnienia) na minimum (pokrętło regulatora zgodnie ze schematem znajduje się w górnym położeniu, czyli 4. noga jest przeciągana przez rezystor R7 do 14, 15, drugi odcinek TL-494). Obracamy częstotliwość generatora, aż pisk zniknie, jest to około 18-20 KHz (strojenie ze słuchu), a jeśli jest czym zmierzyć częstotliwość, to odpowiednio ją dostosowujemy w tych granicach.
Płyta generatora zawiera również dodatkowy regulator napięcia w LM317, przeznaczony do regulacji prędkości wentylatora.
Nie ma tego na schemacie, nie ja to rysowałem
. Obejrzyj film demonstracyjny zegara w działaniu.
Wideo.
Sama tablica zegarowa jest przymocowana do podstawy wentylatora. Zabezpieczyłem to taśmą dwustronną.

Następnie nieznacznie zmodyfikowałem obwód zegara z fotorezystora na fotodiodę podczerwieni (zdjęcie poniżej).
Zamiast prostej diody LED w nadajniku mam teraz diodę na podczerwień.
Rezystor został ustawiony na 100k zamiast 2k.

Krytycznymi momentami w produkcji zegara są produkcja transformatora powietrznego i ustawienie (a raczej wyważenie) płytki zegara na podstawie wentylatora.
Traktuj te chwile poważniej.
Transformator powietrzny.
Opierał się na zwykłej chłodnicy 120 mm z tulejami z brązu. Tablica zegarowa przyklejana jest do podłoża za pomocą taśmy dwustronnej.
Odgryzamy ostrza z chłodnicy i szlifujemy je i wyrównujemy pilnikiem i papierem ściernym. Cewki wykonane są na ramie wykonanej z kanału kablowego. Nie ja wymyśliłem ten projekt, po prostu wziąłem ten pomysł z Internetu. Aby nawinąć transformator, podstawa jest wykonana z kanału kablowego. Co 5 mm robimy nacięcie po bokach kanału i ostrożnie zwijamy go w okrąg, dobierając średnicę tak, aby ściśle przylegała do plastikowej podstawy wentylatora.

Następnie nawijamy 100 zwojów emaliowanego drutu o średnicy 0,25 na trzpień z kanału kablowego.
Pobór prądu zmontowanego transformatora okazał się 200 mA (przy dość zauważalnej przerwie między cewkami).
Ogólnie rzecz biorąc, łącznie z silnikiem wentylatora, pobór prądu wynosi około 0,4-0,5A.
To samo robimy z cewką pierwotną (nadawczą), ale staramy się zachować minimalną szczelinę między cewkami. Cewka nadawcza zawiera również 100 zwojów drutu 0,3 (lub 0,25).
Na schemacie mam nieco inne dane uzwojeń dla tych cewek.

Opłata godzinowa.
Listwa z diodami LED wykonana jest na włóknie szklanym. Wierci się w nim otwór, do tego otworu wkłada się kawałek rurki z anteny teleskopowej i przylutowuje do płytki (rurkę anteny należy oczyścić z błyszczącej powłoki). Można zastosować dowolną odpowiednią rurkę lub przymocować tablicę w inny sposób, np. za pomocą śruby z nakrętkami.
Płytkę z diodami LED połączyłem z płytką zegara zwykłym emaliowanym (uzwojonym) drutem, jest on sztywniejszy od drutu montażowego i nie strzępi się przy obrocie.

Aby zrównoważyć całą deskę, z drugiej strony przyklejamy śrubę o średnicy 3-4 mm za pomocą gorącego kleju, dokręcając różne nakrętki na śrubę z drugiej strony - uzyskujemy minimalne wibracje.
Aby sprawdzić działanie płytki zegara, zwieramy fotorezystor za pomocą śrubokręta lub pęsety, diody LED powinny migać.
Zegar zaczyna działać w momencie pojawienia się napięcia 5 V (jednostka logiczna) na piątej nodze atmegi. Oznacza to, że gdy fotorezystor jest podświetlony, na 5. nodze powinno być 5V,
Gdy fotorezystor nie jest podświetlony, na 5. odnodze atmegi powinno znajdować się logiczne 0 (około 0V), w tym celu wybieramy rezystor do masy z 5. odnogi. Schemat pokazuje 2 kOhm, mam 2,5 Kohm.
Na dole podstawy wentylatora przyklejamy diodę LED tak, aby przy każdym obrocie silnika wentylatora fotorezystor przechodził jak najbliżej źródła światła (LED).
Pilot.
Centrala przeznaczona jest do sterowania pracą zegara, przełączania trybów wyświetlania (zmiany kierunku obrotów wentylatora) oraz ustawiania czasu zegarowego.
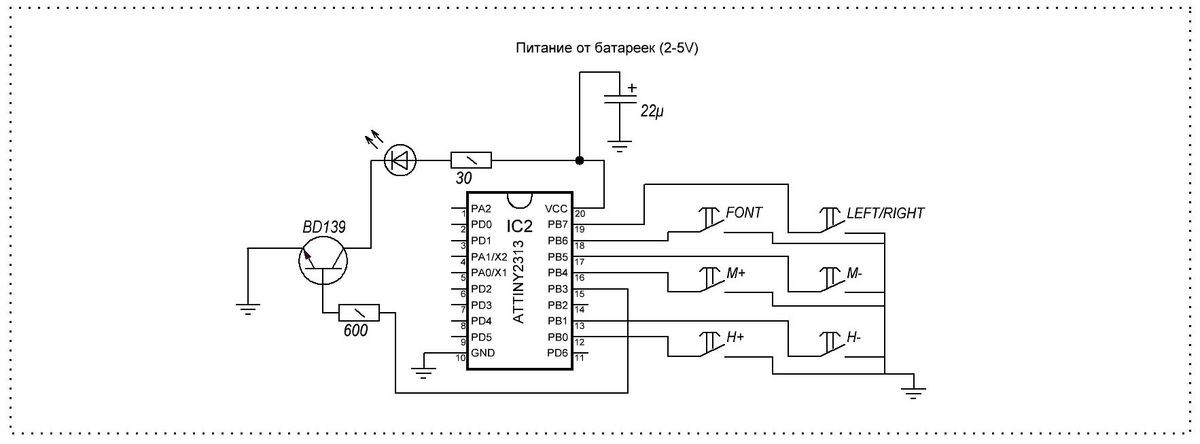
Obwód zdalnego sterowania zmontowany jest na mikrokontrolerze ATTINY2313. Na płytce znajduje się sam MK z uprzężą i sześcioma przyciskami przeznaczonymi do sterowania zegarem.

Obudowy do pilota nie składałem, więc tylko zdjęcie samej płytki.

Informacje o przeznaczeniu przycisków pilota;
Ustawienia zegara H+ i H-
Ustawienie M+ i M- minut
Zmiana kierunku P/L (dla śrub obracających się w prawo i w lewo)
zmiana czcionki (cienka, pogrubiona i napis na stronie internetowej)
Pisząc stronę, za pomocą przycisków H+ i H - dostosuj szerokość napisu.
W załączeniu archiwum zawiera wszystkie pliki niezbędne do złożenia zegarka;
Archiwum artykułu
Jeśli masz jakieś pytania dotyczące konstrukcji zegarka zadaj je na forum, postaram się pomóc i odpowiedzieć na Twoje pytania w miarę możliwości.
Niezwykły dynamiczny zegar LED zasilany silnikiem z dysku twardego.

Schemat urządzenia:




Cóż, kiedy odrzucimy wszelkie wątpliwości, możemy zacząć...
Do wykonania zegarka śmigłowego będziemy potrzebować:
* 2 arkusze włókna szklanego, jeden jest dwustronny (45*120mm), a drugi jednostronny (35*60mm).
* Chlorek żelaza i żelaza (do tablic trawiennych).
* Silnik z dysku HDD.
* Lutownica z cienką końcówką, mini wiertarką.
Dla zegarków:
* Sterownik LED MBI5170CD(SOP16, 8 bit) - 4 sztuki.
* Zegar czasu rzeczywistego DS1307Z/ZN(SMD, SO8) - 1 szt.
* Mikrokontroler ATmega32-16AU (32K Flash, TQFP44, 16MH) - 1 szt.
* Rezonatory kwarcowe 16MHz - 1 szt.
* Rezonatory kwarcowe 32 kHz - 1 szt.
*Ker. kondensator 100nF (0603 SMD) - 6 sztuk.
*Ker. kondensator 22pF (0603 SMD) - 2 sztuki.
*Ker. kondensator 10mF*10v (0603 SMD) - 2 sztuki.
*Rezystor 10kOm (0603 SMD) - 5 sztuk.
*Rezystor 200Om (0603 SMD) - 1 szt.
*Rezystor 270Om (0603 SMD) - 1 szt.
* Rezystor 2kOm (0603 SMD) - 4 sztuki.
* Bateria zegarowa i uchwyt do niej
* Dioda podczerwieni
* Tranzystor podczerwieni
* Diody LED (0850) 33 sztuki (jedna z nich (ostatnia) może być w innym kolorze)
Dla kierowcy silnika:
* Sterownik silnika TDA5140A - 1 szt.
* Stabilizator liniowy 78M05CDT - 1 szt.
* Kondensator polarny 100 mF (0603 SMD) - 1 szt.
*Ker. kondensator 100 nF (0603 SMD) - 1 szt.
* Kondensator polarny 10 mF (0603 SMD) - 2 sztuki.
*Ker. kondensator 10 nF (0603 SMD) - 1 szt.
*Ker. kondensator 220 nF (0603 SMD) - 1 szt.
* 20 nF - 2 sztuki.
*Rezystor 10 kOm (0603 SMD) - 1 szt.
1) Najpierw musimy zrobić 2 deski.


2) Poszukujemy starego, niepotrzebnego dysku twardego, aby wyjąć z niego silnik, w niektórych dyskach twardych silnik nie jest mocowany śrubami, ale jest wciskany w obudowę, zwróć na to uwagę przy wyborze dysku twardego, w przeciwnym razie będziesz muszę to wyciąć :)
Ten projekt zegara śmigłowego wykorzystuje tak zwany POV ( P trwałość O F V ision) – efekt lub mówienie po rosyjsku: efekt wytrwałości. Efekt opiera się na zdolności naszego mózgu i oczu do łączenia szybko zmieniających się (poruszających się lub migoczących) obrazów w jeden obraz. Na tym opiera się na przykład efekt kinowy.
Na YouTube jest wiele różnych filmów z efektami POV, ale wśród nich jest niewiele informacji o tym, jak zrobić takie urządzenia własnymi rękami. W poniższym projekcie postaram się opisać proces tworzenia urządzenia POV.


Cele i założenia projektu
Celem tego projektu jest stworzenie zegara śmigłowego przy użyciu jednego koloru, wykorzystując efekt POV do stworzenia iluzji optycznej. Urządzenie musi wyświetlać obraz (dokładniej jego część w określonym punkcie) po całym okręgu od 0° do 360° z dokładnością do 1°. Nadajnik podczerwieni w połączeniu z odbiornikiem podczerwieni tworzy punkt zerowy umożliwiający śledzenie położenia śmigła.
Nasze urządzenie POV wykorzystuje dwa źródła zasilania: jedno umieszczone jest na płycie śmigła, drugie steruje silnikiem obracającym śmigło. Zasada działania POV będzie następująca: zacznij od punktu zerowego, następnie zapali się co 1° w zależności od położenia śmigła w okręgu 360°.
Wykorzystane radioelementy
PIC18F252 - mikrokontroler. Główny element naszego urządzenia.
74LS373 (analog domowy 555ИР22) - rejestr zatrzaskowy do sterowania diodami LED.
Wentylator komputerowy (3800 obr/min) - wybrałem wentylator z wbudowanym regulatorem prędkości i mocy. Efekt POV wymaga wentylatora o prędkości obrotowej co najmniej 3600 obr./min.
Dioda podczerwieni i fototranzystor – para tych elementów przeznaczona jest do śledzenia punktu zerowego. Gdy śmigło przekroczy punkt zerowy, w mikrokontrolerze zostaje wywołane przerwanie, powodujące rozpoczęcie programu wizualizacyjnego od 0°.
W projekcie wykorzystano także:
Przetwornica 7805 +5V
Kondensator 47uF
Kwarc 40 MHz
2x 330 rezystorów
16 zielonych diod LED
Dioda podczerwieni
Fototranzystor
Deska do chleba
Podłączanie przewodów
Uchwyt na baterię 9V
Programista PICkit2
Schemat obwodu POV
Obwód urządzenia nie jest skomplikowany i składa się z trzech głównych elementów: przetwornika 7805 w zasilaczu, mikrokontrolera PIC18F252 i rejestru 74LS373 do sterowania diodami LED oraz diody IR i fototranzystora do śledzenia punktu zerowego.

Krótko o głównych modułach urządzenia:
Zasilacz
Do zasilania mikrokontrolera poprzez konwerter LM7805 (obudowa T220) otrzymujemy standardowe +5V. Kondensator wyjściowy służy do filtrowania przepięć napięcia.
Sterowanie diodami
PIC18F252 wykorzystuje 8-bitową magistralę danych z 2 liniami sterującymi 74LS373, które włączają lub wyłączają diody LED w zależności od przychodzących danych. Dzięki tej konstrukcji obwodu można jednocześnie sterować tylko jednym mikroukładem 74LS373, więc diody LED nie świecą przy 100% synchronizacji.
Śledzenie punktu zerowego
Synchronizacja obrazu odbywa się za pomocą punktu zerowego, który jest śledzony za pomocą diody IR i fototranzystora. Kiedy światło z diody pada na tranzystor, otwiera się i +5V z kolektora przechodzi do +0V emitera. Sterownik PIC wykrywa zanik sygnału i wykonuje program powrotu zerowego.
O chipie 74LS373
Układ 74LS373 (krajowy odpowiednik 555ИР22) to rejestr zatrzaskowy z trzema stanami wyjściowymi, zawierający 8 przerzutników typu D. Arkusz danych w formacie PDF.

Użyłem tego chipa jako sterownika LED. Wyjście m/s włącza lub wyłącza odpowiednie diody LED. Każdy m/s ma dwa wejścia sterujące: LE (włączenie zatrzasku) i OE (włączenie wyjścia). Poniżej pokrótce opiszę jak wykorzystać te wejścia w naszym projekcie.
Włącz wyjście (OE)- łączy/rozłącza wyjście mikroukładu. Wejście jest odwrócone. Jeśli na wejściu jest 1, to na wyjściu znajduje się stan wysokiej rezystancji, jeśli na wejściu jest 0, to dane są przesyłane z wejścia na wyjście (patrz tabela prawdy w arkuszu danych).
Zatrzask włączony (LE)- wejście, w zależności od stanu, w którym m/s zapisze aktualny stan wyjść, lub ustawi nowy stan wyjść, w zależności od danych na wejściu. Jeżeli wejście LE jest aktywne (logiczna 1 na wejściu) wówczas dane przesyłane są swobodnie z wejścia na wyjście. Jeżeli na wejściu znajduje się wartość 0, wówczas dane nie są przesyłane, a stan wyjścia zależy od poprzedniej wartości wejść.
Obliczanie czasów POV
Aby wyświetlić odpowiednie dane w określonej pozycji POV, musimy bardzo dokładnie obliczyć wszystkie czasy i opóźnienia. Na szczęście PIC ma wbudowany zegar i właśnie tego będziemy używać.
Prędkość wentylatora = 3800 obr./min
Znajdźmy częstotliwość obrotów na sekundę 3800/60 = 63,3333 obr./min.
1 pełne koło = 1/63,3333 = 0,015789 sekundy
Obrót o 1° = 0,015789/360 = 0,000043859 sekundy
Częstotliwość wykonywania instrukcji 40 MHz/4 = 10 MHz
Instrukcje na 1° obrotu = 43,86 µs/10000000 = 438,6
To 438 instrukcji na każdy 1° obrotu.
To. Znając prędkość wentylatora, możemy znaleźć czas na obrót o 1°. Otrzymaliśmy wartość 43,86 µs, będzie to interwał wywołania przerwania mikrokontrolera, według którego będzie aktualizowany stan diod LED. Aby uzyskać pełny obraz, będziemy musieli wyświetlić jego stan LED dla każdego z 360 stopni.
Śledzenie pozycji zerowej
Aby nasz projekt POV był dokładniejszy w wyświetlaniu obrazu, zastosowałem sterowanie punktem zerowym za pomocą diody IR LED i fototranzystora. Po przekroczeniu punktu 0° obraz zostaje zresetowany i rozpoczyna się nowy cykl.
Powyższy film pokazuje przykład prostego obwodu wykorzystującego diodę IR. Gdy dioda podczerwieni jest włączona, fototranzystor wykrywa promieniowanie i wyłącza czerwoną diodę LED. Tę samą zasadę zastosowano w naszym projekcie do wykrywania pozycji zerowej.

Powyższy obrazek pokazuje, jak w naszym projekcie POV zaimplementowano śledzenie punktu zerowego. Za każdym razem, gdy śmigło przechodzi nad diodą podczerwieni, tranzystor otwiera się, łącząc +5 V z kolektora z masą emitera. Mikrokontroler PIC wykrywa tę zmianę stanu i tak dalej. określa punkt zerowy.
Produkcja platformy śmigła
Na poniższym obrazku zebrałem wszystkie części, które będą nam potrzebne do wykonania POV. Nie pokazano jedynie zasilania wentylatora i diody IR.

Najpierw musimy przymocować wentylator do podstawy, do tego używamy 4 śrub i nakrętek.

W tym celu wywierć cztery otwory w podstawie i zamocuj wentylator na środku podstawy.

Do wentylatora mocujemy mały kawałek sklejki za pomocą kleju lub żywicy epoksydowej.

Obcinamy łopatki wentylatora i mocujemy uchwyt baterii 9V.


Wiercimy cztery otwory w desce i mocujemy ją do 4 kołków ze sklejki. Staramy się zachować równowagę.


Odkręcamy deskę i czynimy ją prostokątną. Następnie mocujemy go ponownie.

Układ elementów radiowych
Podczas układania części na planszy należy zachować równowagę, aby podczas obracania nie było niewyważenia. Staraj się układać części bliżej środka i równomiernie, w przyszłości możesz do deski przymocować ciężarki w celu wyważenia (tak właśnie zrobiłem, przyczepiając dwie monety).
Na płytce stykowej zastosowałem montaż wire-wrap, tzw. metodę oldschoolową. Użyłem gniazd do mikroukładów.

Na początek umieściłem wszystkie gniazda i elementy stabilizatora.

Następnym krokiem jest umieszczenie diod LED w jednym rzędzie po przeciwnej stronie płytki.

Po zainstalowaniu wszystkiego przekręć lub przylutuj wszystkie piny zgodnie ze schematem obwodu POV

Najpierw podłączyłem mikrokontroler PIC i przerzutniki

Następnie podłączyłem diody do źródła zasilania i obwodu sterującego.

Ostatnim krokiem było przymocowanie diody podczerwieni do podstawy.

Dioda IR musi być bardzo mocno zamocowana

I należy go umieścić naprzeciwko fototranzystora na płytce.

Nasz projekt POV jest już prawie gotowy!

Pozostaje tylko wgrać oprogramowanie i przetestować je
Oprogramowanie
Główne funkcje programu to:
-Przerwanie RB0 o wysokim priorytecie
-Przerwanie timera 0 o niskim priorytecie
Przerwanie RB0 o wysokim priorytecie
Zadaniem tej funkcji przerwania o wysokim priorytecie jest zresetowanie timera 0 i rozpoczęcie wysyłania sygnału do diody LED od początku. Kiedy generowany jest efekt POV, jest on wyświetlany wiele razy na sekundę. Zmienna led_count służy jako licznik przerwań czasowych, aby wiedzieć, które wyjście ma być wysyłane do diody LED w celu wyświetlenia. INT0 jest również resetowany.
Przerwanie timera 0 o niskim priorytecie
Void InterruptHandlerHigh() ( if(INTCONbits.INT0IF) //sprawdź, czy ustawiona jest flaga przerwania INT0 ( led_count = 325; WriteTimer0(0xFFE0); INTCONbits.TMR0IF = 0; //Wyczyść flagę TMR0 INTCONbits.INT0IF = 0; ) INTCONbits. GIEH = 1; )
Po przerwaniu przez Timer0 zmienna led_count jest zmniejszana. Warunek if/else służy do wysyłania danych/tekstu zegara itp.
Testy POV
Dotarliśmy do ostatniego etapu naszego projektu POV. Pozostaje tylko odpalić wszystko i cieszyć się efektem POV. Na poniższym klipie można zobaczyć wszystkie etapy budowy i testowania zegara śmigłowego.
Odstępy co 1° mogą być z łatwością przetwarzane przez MK 40 MHz. To. Można wyświetlać zarówno informacje graficzne, jak i tekstowe, myślę, że pamięć flash mikrokontrolera wystarczy na dowolne wzorce
Podsumowując, chciałbym powiedzieć, że jest to bardzo prosty projekt POV, który można wykorzystać jako podstawę do dowolnego ulepszonego POV. I tu jest coś do poprawy: może to być zastosowanie diod LED RGB do uzyskania kolorowego obrazu, albo zastosowanie jednego źródła zasilania dla całego systemu itp. To śmigło działa tylko przez kilka godzin na baterii 9 V.
Pobierz źródła
Oryginalny artykuł w języku angielskim (tłumaczenie A.V. Kołtykowa dla strony internetowej)
Lista radioelementów
| Przeznaczenie | Typ | Określenie | Ilość | Notatka | Sklep | Mój notatnik |
|---|---|---|---|---|---|---|
| Mikrokontroler | PIC18F252 | 1 | Do notatnika | |||
| Rejestr zatrzaskowy | SN74LS373 | 2 | 555IR22 | Do notatnika | ||
| regulator liniowy | LM7805 | 1 | Do notatnika | |||
| Fototranzystor | 1 | Do notatnika | ||||
| Kondensator elektrolityczny | 47 µF | 1 | Do notatnika | |||
| Rezystor | 47 omów | 1 | Do notatnika | |||
| Rezystor |
Ten film przedstawia ciekawy zegarek zwany śmigłem. Ich przygotowanie zajęło trzy wieczory. Wcześniej nie było dobrego schematu tego zegara. Teraz, gdy odnaleziono bardzo dobry, prosty i łatwy w montażu obwód, pojawiła się możliwość jego powtórzenia. Schemat zawiera pliki z płytkami drukowanymi. Obwód zegara jest prosty, dostępny dla początkujących radioamatorów, którzy potrafią wykonać płytki drukowane i sflashować sterownik.
Części do radia można tanio kupić w tym chińskim sklepie.
Dlaczego zegar nazywa się śmigłem? Ta konstrukcja jest obracana przez wentylator, czyli chłodnicę komputerową. Jak widać na rotorze znajduje się tablica kontrolna z diodami LED. Tworzą efekt zegara. Diodami sterują mikroprocesory, które w określonych momentach zapalają diody i dają efekt obrazu w przestrzeni tarczy.
Na filmie obraz trochę migocze, ale jest to tylko efekt nagrywania wideo. Tak naprawdę wszystko świeci bardzo jasno i wyraźnie, szczególnie w ciemności.
Film pokazuje, że można poprawnie ustawić czas i sterować silnikiem obracającym diody LED.
W rezultacie powstał bardzo piękny, ciekawy zegarek z nietypowym mechanizmem i zasadą działania. O zegarkach automatycznych.
Zegar śmigła w silniku z dyskiem twardym
Niezwykły dynamiczny zegar LED zasilany silnikiem z dysku twardego.
Zegarek ze śmigłem
Schemat urządzenia:

Schemat ideowy Zdjęcie: 1

Schemat obwodu Zdjęcie: 2

Schemat ideowy Zdjęcie: 3

Schemat ideowy Zdjęcie: 4
Cóż, kiedy odrzucimy wszelkie wątpliwości, możemy zacząć...
Do wykonania zegarka śmigłowego będziemy potrzebować:
* 2 arkusze włókna szklanego, jeden jest dwustronny (45*120mm), a drugi jednostronny (35*60mm).
* Chlorek żelaza i żelaza (do tablic trawiennych).
* Silnik z dysku HDD.
* Lutownica z cienką końcówką, mini wiertarką.
Dla zegarków:
* Sterownik LED MBI5170CD(SOP16, 8 bit) – 4 sztuki.
* Zegar czasu rzeczywistego DS1307Z/ZN(SMD, SO8) – 1 szt.
* Mikrokontroler ATmega32-16AU (32K Flash, TQFP44, 16MH) – 1 szt.
* Rezonatory kwarcowe 16MHz – 1 szt.
* Rezonatory kwarcowe 32kHz – 1 szt.
*Ker. kondensator 100nF (0603 SMD) – 6 szt.
*Ker. kondensator 22pF (0603 SMD) – 2 szt.
*Ker. kondensator 10mF*10v (0603 SMD) – 2 sztuki.
*Rezystor 10kOm (0603 SMD) – 5 sztuk.
*Rezystor 200Om (0603 SMD) – 1 szt.
*Rezystor 270Om (0603 SMD) – 1 szt.
* Rezystor 2kOm (0603 SMD) – 4 sztuki.
* Bateria zegarowa i uchwyt do niej
* Dioda podczerwieni
* Tranzystor podczerwieni
* Diody LED (0850) 33 sztuki (jedna z nich (ostatnia) może być w innym kolorze)
Dla kierowcy silnika:
* Sterownik silnika TDA5140A – 1 szt.
* Stabilizator liniowy 78M05CDT – 1 szt.
* Kondensator polarny 100 mF (0603 SMD) – 1 szt.
*Ker. kondensator 100 nF (0603 SMD) – 1 szt.
* Kondensator polarny 10 mF (0603 SMD) – 2 sztuki.
*Ker. kondensator 10 nF (0603 SMD) – 1 szt.
*Ker. kondensator 220 nF (0603 SMD) – 1 szt.
* 20 nF – 2 sztuki.
*Rezystor 10 kOm (0603 SMD) – 1 szt.
1) Najpierw musimy zrobić 2 deski.

Widok z dołu płytki drukowanej

Widok z góry płytki drukowanej
2) Poszukujemy starego, niepotrzebnego dysku twardego, aby wyjąć z niego silnik, w niektórych dyskach twardych silnik nie jest mocowany śrubami, ale jest wciskany w obudowę, zwróć na to uwagę przy wyborze dysku twardego, w przeciwnym razie będziesz muszę to wyciąć :)
W Internecie można znaleźć wiele dziwacznych projektów elektronicznych, co nie daje wytchnienia dociekliwemu umysłowi.
I choć „zegar śmigłowy” nie jest niczym nowym w wielkiej sieci, kiedy pewnego dnia natknąłem się na schemat zegara z efektem stroboskopowym, nie mogłem przejść obok niego obojętnie.
Trochę teorii
Główną ideą urządzenia jest mikrokontrolerowe sterowanie grupą diod LED zamontowanych na szybko obracającej się podstawie.
Kod określa pętlę, która powtarza się po zewnętrznym przerwaniu. Załóżmy, że długość całkowitej serii wynosi 15 ms. W tym czasie każda dioda LED zaświeci się n-liczbę razy. Przy małych prędkościach obrotowych ludzkie oko wykryje jedynie pojedyncze włączenie wszystkich diod na raz. Jednak gdy tylko prędkość obrotowa zostanie zwiększona, małe odstępy całej serii zaczną się rozciągać wzdłuż osi X, a oko zacznie wykrywać niejednoczesne wyzwalanie. Będzie to trwało aż do osiągnięcia określonej granicznej prędkości obrotowej, przy której odstęp 15 ms zostanie obrócony o określoną długość wzdłuż osi X, przy czym interwały migania w ramach ogólnego impulsu będą wyraźnie widoczne i zostaną narysowane liczby, które dodadzą aż do ogólnego obrazu. Dalszy wzrost prędkości obrotowej spowoduje rozciągnięcie całego pakietu impulsów i liczby staną się nieczytelne.
Płytka została przeprojektowana pod kątem komponentów SMD, ponieważ im lżejsza płyta, tym mniejsze obciążenie wentylatora.
Część obrotowa składa się z płyty głównej oraz tablicy sygnalizacyjnej, na której zamontowane są diody LED.

Jako diody prostownicze zastosowałem diody Schottky'ego SS12. Przylutowałem 18-pinowe gniazdo pod mikrokontrolerem, ponieważ konieczny był „start na biegu jałowym”.
Długość ramienia można dostosować do gustu, biorąc pod uwagę komfort oglądania świetlistej części. Moim zdaniem optymalny jest skan 90-110 stopni. Opcja skanowania mniejsza niż 90 stopni spowoduje zamieszanie w liczbach, a wartość większa niż 110 stopni spowoduje nadmierne rozciągnięcie obrazu.
Początkowo wybrałem długość ramienia 65 mm, ale doświadczenie się nie udało i gotową deskę odciąłem do 45 mm.
Płytka LED wygląda następująco:

Posiada 7 głównych diod LED i 2 diody podświetlające. Wszystkie diody LED mają średnicę 5 mm.
Połączenia pomiędzy dwiema płytkami wykonuje się poprzez lutowanie pól łączących. Wytrawiłem deski, przeprowadziłem montaż i połączyłem. Teraz musisz umieścić je na wirniku wentylatora.
Aby to zrobić, wywierciłem 3 otwory o rozstawie 120 stopni.

Włożyłem w nie śruby z łbem stożkowym o średnicy 3 mm i długości 20 mm. Zabezpieczyłem to nakrętkami i przykręciłem do nich deski.

Końce uzwojenia wtórnego zostały przylutowane do płytki. Zainstalowałem przeciwwagę kompensacyjną po przeciwnej stronie tablicy wyświetlacza, aby zmniejszyć uderzenia podczas obrotu.
Nadszedł czas na jałową pracę bez mikrokontrolera. Umieściłem wirnik z płytkami drukowanymi na swoim miejscu na wentylatorze i zasiliłem generator HF, wentylator nadal stoi nieruchomo. Zapaliły się diody podświetlenia. Sprawdziłem napięcie wejściowe, spadło do 10 V, jest to normalne. Pozostaje zainstalować synchronizujący transoptor składający się z fotodiody podczerwieni i diody LED na podczerwień. Do podstawy wentylatora przyklejono diodę IR i zasilano ją z głównego zasilacza +12 V poprzez rezystor 470 Ohm. Na płytkę przylutowana jest zwykła fotodioda IR.
Zainstalowałem transoptor tak, aby podczas obracania fotodiody przelatywała nad diodą LED jak najbliżej.

Zaprogramowałem to.
Zamontowałem sterownik w gnieździe i zabezpieczyłem wirnik pierścieniem ustalającym.

Czas wystartować!
Pierwsze włączenie sprawiło mi radość i smutek jednocześnie. Układ zadziałał, diody pokazywały godzinę 12:00 tak jak miały, jednak obraz był rozmazany w osi X. Zacząłem „odprawę”, w efekcie doszedłem do wniosku, że trzeba wymienić fotodiodę. Rozrzut obszaru reakcji na zakłócenia zewnętrzne MK okazał się zbyt duży.
Zdecydowałem się zamontować fotodiodę o węższym spektrum promieniowania, a dodatkowo zakleiłem diodę LED czarną taśmą izolacyjną.

Obszar wyzwalania zmniejszył się 2-3 razy, a późniejsza aktywacja była przyjemna: rozmycie całkowicie zniknęło.
Jeszcze raz zaznaczę, że wentylatory małej mocy nie przyspieszą tej konstrukcji do wymaganej prędkości obrotowej, a obraz będzie migał przed oczami. Projekt przerabiałem trzykrotnie i to tylko w wersji na wentylatorze o parametrach 0,4 A; 4,8 W; 3200 obr/min działało dobrze.
Oczywistą wadą konstrukcji jest brak zapasowego zasilania sterownika. Tak, tak, czas będzie resetowany po każdym odłączeniu głównego zasilania +12V.