นาฬิกาใบพัดบน Atmega8 POV - นาฬิกาใบพัด นาฬิกาใบพัด DIY บนไดอะแกรม pic16f628a
สวัสดีทุกคน! ฉันอยากจะแจ้งให้คุณทราบถึงนาฬิกาใบพัดธรรมดาที่ฉันประกอบบนคอนโทรลเลอร์ Atmega8 ทำจากชิ้นส่วนที่หาได้ง่ายและง่ายต่อการทำซ้ำและผลิต สิ่งเดียวคือคุณต้องมีโปรแกรมเมอร์เพื่อแฟลชตัวควบคุมนาฬิกาและแผงควบคุม
ใช้พัดลมขนาด 120 มม. (ตัวทำความเย็น) ปกติสำหรับฐานของนาฬิกา คุณสามารถใช้พัดลมใดก็ได้สำหรับนาฬิกานี้ทั้งตามเข็มนาฬิกาและทวนเข็มนาฬิกา เพราะในขณะที่ฉันกำลังประกอบนาฬิกานี้ ฉันได้แก้ไขโปรแกรมเล็กน้อยและสลับการแสดงสัญลักษณ์จากรีโมทคอนโทรลโดยทางโปรแกรม
วงจรของนาฬิกานั้นค่อนข้างง่ายและประกอบบนไมโครคอนโทรลเลอร์ Atmega8 เพื่อซิงโครไนซ์การทำงานของนาฬิกาควอทซ์ที่มีความถี่ 32768 Hz
นาฬิกาใช้พลังงานจากคอยล์รับ ซึ่งเป็นพลังงานที่ถ่ายโอนจากเครื่องกำเนิดไฟฟ้าด้วยคอยล์ส่งสัญญาณ ขดลวดทั้งสองนี้ประกอบเป็นหม้อแปลงอากาศ

ไม่มีปัญหาเฉพาะกับวงจรและการออกแบบเครื่องกำเนิดไฟฟ้าเนื่องจากใช้เครื่องกำเนิดไฟฟ้าจากพลาสมาบอล

เครื่องกำเนิดไฟฟ้าประกอบขึ้นบนวงจรไมโคร TL494 ทั่วไปและช่วยให้คุณเปลี่ยนความกว้างและความถี่ของพัลส์เอาท์พุตในช่วงกว้าง
แม้ว่าจะมีช่องว่างระหว่างขดลวดประมาณหนึ่งเซนติเมตร แต่แรงดันไฟฟ้าก็เพียงพอที่จะเริ่มนาฬิกาได้ เพียงคำนึงว่ายิ่งช่องว่างระหว่างขดลวดมีขนาดใหญ่เท่าใด ความกว้างของพัลส์ก็จะยิ่งมากขึ้นเท่านั้น และด้วยเหตุนี้ ปริมาณการใช้กระแสไฟจากแหล่งกำเนิดจึงเพิ่มขึ้น

เมื่อเปิดเครื่องกำเนิดไฟฟ้าเป็นครั้งแรกให้ตั้งค่าความกว้างพัลส์ (ปัจจัยหน้าที่) ให้น้อยที่สุด (ปุ่มควบคุมอยู่ในตำแหน่งด้านบนตามแผนภาพนั่นคือขาที่ 4 จะถูกดึงผ่านตัวต้านทาน R7 ถึง 14 15 ขาที่ 2 ของ TL-494) เราหมุนความถี่ของเครื่องกำเนิดจนกระทั่งเสียงแหลมหายไปนี่คือประมาณ 18-20 KHz (จูนด้วยหู) และหากมีสิ่งใดที่จะวัดความถี่เราจะปรับตามภายในขอบเขตเหล่านี้
บอร์ดเครื่องกำเนิดไฟฟ้ายังมีตัวควบคุมแรงดันไฟฟ้าเพิ่มเติมบน LM317 ซึ่งออกแบบมาเพื่อควบคุมความเร็วพัดลม
มันไม่ได้อยู่ในแผนภาพ ฉันไม่ได้วาดมัน
. ชมวิดีโอสาธิตการทำงานของนาฬิกา
วีดีโอ
บอร์ดนาฬิกานั้นติดอยู่กับฐานของพัดลม ฉันยึดมันด้วยเทปสองหน้า

จากนั้นฉันก็ปรับเปลี่ยนวงจรนาฬิกาเล็กน้อยจากโฟโตรีซีสเตอร์ไปเป็นโฟโตไดโอดอินฟราเรด (ภาพด้านล่าง)
แทนที่จะเป็น LED แบบธรรมดาในเครื่องส่งสัญญาณ ตอนนี้ฉันมีอินฟราเรดแล้ว
ตัวต้านทานถูกตั้งค่าเป็น 100k แทนที่จะเป็น 2k

ช่วงเวลาสำคัญในการผลิตนาฬิกาคือการผลิตหม้อแปลงลมและการจัดตำแหน่ง (หรือค่อนข้างสมดุล) ของแผงนาฬิกาบนฐานของพัดลม
ใช้เวลาเหล่านี้อย่างจริงจังมากขึ้น
หม้อแปลงแอร์.
มีพื้นฐานมาจากคูลเลอร์ธรรมดาขนาด 120 มม. พร้อมด้วยบูชสีบรอนซ์ บอร์ดนาฬิกาติดกาวที่ฐานด้วยเทปสองหน้า
เรากัดใบมีดออกจากเครื่องทำความเย็นแล้วบดและปรับระดับด้วยตะไบและกระดาษทราย ขดลวดทำบนโครงที่ทำจากท่อสายเคเบิล ฉันไม่ได้คิดการออกแบบนี้ ฉันแค่นำแนวคิดนี้มาจากอินเทอร์เน็ต ในการพันหม้อแปลงจะมีฐานทำจากช่องเคเบิล เราตัดด้านข้างของช่องทุกๆ 5 มม. แล้วค่อยๆ ม้วนเป็นวงกลม เลือกเส้นผ่านศูนย์กลางเพื่อให้พอดีกับฐานพลาสติกของพัดลม

ต่อไปเราพันลวดเคลือบ 100 รอบเส้นผ่านศูนย์กลาง 0.25 ลงบนแมนเดรลจากช่องเคเบิล
ปริมาณการใช้กระแสไฟของหม้อแปลงประกอบกลายเป็น 200 mA (ซึ่งมีช่องว่างระหว่างขดลวดที่เห็นได้ชัดเจน)
โดยทั่วไปเมื่อรวมกับมอเตอร์พัดลมแล้วการสิ้นเปลืองกระแสไฟจะอยู่ที่ประมาณ 0.4-0.5A
เราทำเช่นเดียวกันกับคอยล์หลัก (ส่งผ่าน) แต่เราพยายามสร้างช่องว่างขั้นต่ำระหว่างคอยล์ คอยล์ส่งสัญญาณยังประกอบด้วยลวด 0.3 จำนวน 100 รอบ (หรือ 0.25)
ในแผนภาพฉันมีข้อมูลการพันขดลวดที่แตกต่างกันเล็กน้อยสำหรับคอยล์เหล่านี้

ค่าธรรมเนียมชั่วโมง.
แถบที่มีไฟ LED ทำจากไฟเบอร์กลาส มีการเจาะรูในนั้นโดยสอดท่อจากเสาอากาศแบบยืดไสลด์เข้าไปในรูนี้แล้วบัดกรีเข้ากับบอร์ด (ต้องทำความสะอาดท่อเสาอากาศที่มีการเคลือบมันวาว) คุณสามารถใช้ท่อที่เหมาะสมหรือติดบอร์ดด้วยวิธีอื่น เช่น ใช้สกรูพร้อมน็อต
ฉันเชื่อมต่อบอร์ดด้วยไฟ LED เข้ากับบอร์ดนาฬิกาด้วยลวดเคลือบฟันธรรมดา (ม้วน) มันแข็งกว่าลวดยึดและไม่หลุดเมื่อหมุน

เพื่อปรับสมดุลทั้งกระดาน ในอีกด้านหนึ่งเราติดสกรูที่มีเส้นผ่านศูนย์กลาง 3-4 มม. ด้วยกาวร้อน ขันน็อตต่างๆ เข้ากับสกรูในอีกด้านหนึ่ง - เราจะได้การสั่นสะเทือนน้อยที่สุด
ในการตรวจสอบการทำงานของบอร์ดนาฬิกาให้ลัดวงจรโฟโตรีซีสเตอร์ด้วยไขควงหรือแหนบ โดยไฟ LED ควรกระพริบ
นาฬิกาเริ่มทำงานเมื่อ 5V (หน่วยทางลอจิคัล) ปรากฏบนขาที่ 5 ของ atmega นั่นคือเมื่อโฟโตรีซีสเตอร์สว่างขึ้น ควรมี 5V ที่ขาที่ 5
เมื่อโฟโตรีซีสเตอร์ไม่ส่องสว่าง ควรมีตรรกะ 0 (ประมาณ 0V) บนขาที่ 5 ของ atmega ด้วยเหตุนี้เราจึงเลือกตัวต้านทานที่จะกราวด์จากขาที่ 5 แผนภาพแสดง 2 kOhm ฉันได้ 2.5 Kohm
ที่ด้านล่างของฐานพัดลม เราจะติด LED เพื่อให้ในแต่ละรอบของมอเตอร์พัดลม โฟโตรีซีสเตอร์จะผ่านเข้าไปใกล้แหล่งกำเนิดแสง (LED) มากที่สุด
รีโมท.
แผงควบคุมได้รับการออกแบบมาเพื่อควบคุมการทำงานของนาฬิกา สลับโหมดการแสดงผล (เปลี่ยนทิศทางการหมุนพัดลม) และตั้งเวลานาฬิกา
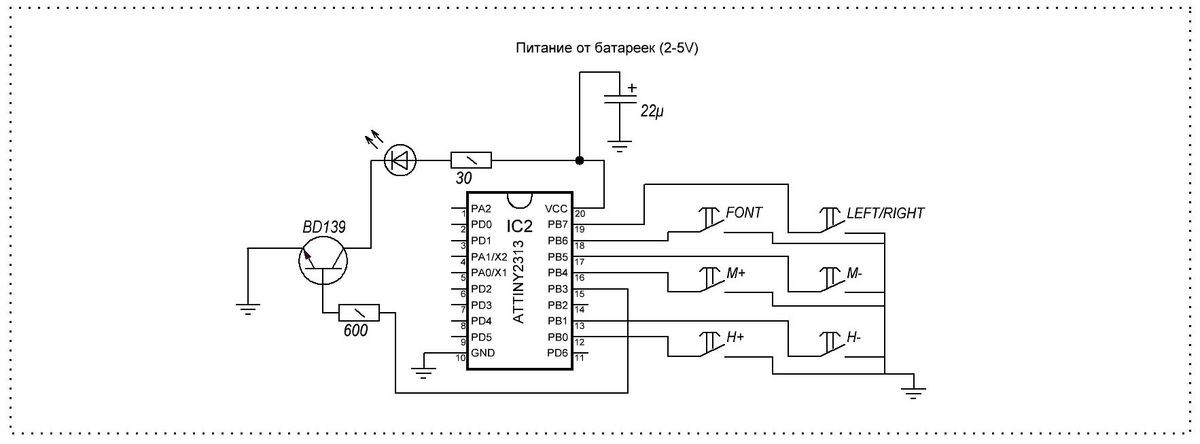
วงจรควบคุมระยะไกลประกอบอยู่บนไมโครคอนโทรลเลอร์ ATTINY2313 บอร์ดประกอบด้วย MK พร้อมสายรัดและปุ่มหกปุ่มที่ออกแบบมาเพื่อควบคุมนาฬิกา

ฉันไม่ได้ประกอบตัวเครื่องสำหรับรีโมทคอนโทรล ดังนั้นจึงมีเพียงรูปถ่ายของตัวบอร์ดเท่านั้น

ข้อมูลเกี่ยวกับวัตถุประสงค์ของปุ่มควบคุมระยะไกล
การตั้งค่านาฬิกา H+ และ H
การตั้งค่า M+ และ M- นาที
การเปลี่ยนทิศทาง R/L (สำหรับสกรูที่หมุนตามเข็มนาฬิกาและทวนเข็มนาฬิกา)
แบบอักษรเปลี่ยนแบบอักษร (บาง, ตัวหนาและจารึกเว็บไซต์)
เมื่อเขียนไซต์ ให้ใช้ปุ่ม H+ และ H - เพื่อปรับความกว้างของคำจารึก
ไฟล์เก็บถาวรที่แนบมาประกอบด้วยไฟล์ที่จำเป็นทั้งหมดสำหรับการประกอบนาฬิกา
ที่เก็บถาวรสำหรับบทความ
หากคุณมีคำถามเกี่ยวกับดีไซน์ของนาฬิกา โปรดถามในฟอรัม ฉันจะพยายามช่วยเหลือและตอบคำถามของคุณให้มากที่สุด
นาฬิกา LED ไดนามิกที่ผิดปกติซึ่งขับเคลื่อนโดยมอเตอร์จากฮาร์ดไดรฟ์

แผนภาพอุปกรณ์:




เมื่อคลายข้อสงสัยทั้งหมดแล้ว เราก็มาเริ่มกันเลย...
ในการสร้างนาฬิกาใบพัดเราจะต้อง:
* ไฟเบอร์กลาส 2 แผ่น แผ่นหนึ่งเป็นแบบสองด้าน (45*120 มม.) และแผ่นที่สองเป็นแบบด้านเดียว (35*60 มม.)
* เหล็กและเฟอร์ริกคลอไรด์ (สำหรับกัดกระดาน)
* มอเตอร์จากไดรฟ์ HDD
* หัวแร้งบัดกรีปลายบาง สว่านขนาดเล็ก
สำหรับนาฬิกา:
* ไดรเวอร์ LED MBI5170CD(SOP16, 8 บิต) - 4 ชิ้น
* นาฬิกาเรียลไทม์ DS1307Z/ZN(SMD, SO8) - 1 ชิ้น
* ไมโครคอนโทรลเลอร์ ATmega32-16AU (32K Flash, TQFP44, 16MH) - 1 ชิ้น
* เครื่องสะท้อนเสียงควอตซ์ 16MHz - 1 ชิ้น
* เครื่องสะท้อนเสียงควอตซ์ 32kHz - 1 ชิ้น
* เคอร์ ตัวเก็บประจุ 100nF (0603 SMD) - 6 ชิ้น
* เคอร์ ตัวเก็บประจุ 22pF (0603 SMD) - 2 ชิ้น
* เคอร์ ตัวเก็บประจุ 10mF*10v (0603 SMD) - 2 ชิ้น
* ตัวต้านทาน 10kOm (0603 SMD) - 5 ชิ้น
* ตัวต้านทาน 200Om (0603 SMD) - 1 ชิ้น
* ตัวต้านทาน 270Om (0603 SMD) - 1 ชิ้น
* ตัวต้านทาน 2kOm (0603 SMD) - 4 ชิ้น
* ถ่านนาฬิกาและที่ใส่
* อินฟาเรด LED
* ทรานซิสเตอร์อินฟราเรด
* LEDs (0850) 33 ชิ้น (หนึ่งในนั้น (อันสุดท้าย) อาจมีสีอื่นได้)
สำหรับตัวขับมอเตอร์:
* ไดรเวอร์มอเตอร์ TDA5140A - 1 ชิ้น
* โคลงเชิงเส้น 78M05CDT - 1 ชิ้น
* คาปาซิเตอร์ 100 mF ขั้ว (0603 SMD) - 1 ตัว
* เคอร์ ตัวเก็บประจุ 100 nF (0603 SMD) - 1 ชิ้น
* คาปาซิเตอร์ 10 mF ขั้ว (0603 SMD) - 2 ตัว.
* เคอร์ ตัวเก็บประจุ 10 nF (0603 SMD) - 1 ชิ้น
* เคอร์ ตัวเก็บประจุ 220 nF (0603 SMD) - 1 ชิ้น
* 20 nF - 2 ชิ้น
* ตัวต้านทาน 10 kOm (0603 SMD) - 1 ชิ้น
1) ก่อนอื่นเราต้องสร้างบอร์ด 2 อัน


2) เรากำลังมองหาฮาร์ดไดรฟ์เก่าที่ไม่จำเป็นเพื่อถอดมอเตอร์ออกจากนั้น ในฮาร์ดไดรฟ์บางตัวมอเตอร์ไม่ได้ติดด้วยสลักเกลียว แต่ถูกกดเข้าไปในเคส ให้ใส่ใจกับสิ่งนี้เมื่อเลือกฮาร์ดไดรฟ์ มิฉะนั้นคุณจะ ต้องตัดมันออก :)
โครงการนาฬิกาใบพัดนี้ใช้สิ่งที่เรียกว่า POV ( ปการคงอยู่ โอฉ วี ision) - เอฟเฟกต์หรือการพูดเป็นภาษารัสเซีย: เอฟเฟกต์การคงอยู่ เอฟเฟกต์นี้ขึ้นอยู่กับความสามารถของสมองและดวงตาของเราในการรวมภาพที่เปลี่ยนแปลงอย่างรวดเร็ว (เคลื่อนไหวหรือกะพริบ) ให้เป็นภาพเดียว ตัวอย่างเช่น เอฟเฟ็กต์ภาพยนตร์จะขึ้นอยู่กับสิ่งนี้
มีวิดีโอต่างๆ มากมายที่มีเอฟเฟกต์ POV บน YouTube แต่ในบรรดาวิดีโอเหล่านั้นมีข้อมูลเพียงเล็กน้อยเกี่ยวกับวิธีการสร้างอุปกรณ์ดังกล่าวด้วยมือของคุณเอง ในโครงการด้านล่างนี้ ฉันจะพยายามอธิบายกระบวนการสร้างอุปกรณ์ POV


เป้าหมายและวัตถุประสงค์ของโครงการ
เป้าหมายของโปรเจ็กต์นี้คือการสร้างนาฬิกาใบพัดโดยใช้สีเดียว โดยใช้เอฟเฟกต์ POV เพื่อสร้างภาพลวงตา อุปกรณ์จะต้องแสดงภาพ (แม่นยำยิ่งขึ้น ส่วนหนึ่งของภาพ ณ จุดใดจุดหนึ่ง) ทั่วทั้งวงกลมตั้งแต่ 0° ถึง 360° ด้วยความแม่นยำ 1° เครื่องส่ง IR ที่จับคู่กับเครื่องรับ IR จะสร้างจุดศูนย์เพื่อติดตามตำแหน่งของใบพัด
อุปกรณ์ POV ของเราใช้แหล่งพลังงานสองแหล่ง: แหล่งหนึ่งตั้งอยู่บนบอร์ดใบพัด ส่วนแหล่งที่สองควบคุมมอเตอร์ที่หมุนใบพัด หลักการทำงานของ POV จะเป็นดังนี้: เริ่มจากจุดศูนย์ จากนั้นทุกๆ 1° จะสว่างขึ้น ขึ้นอยู่กับตำแหน่งของใบพัดในวงกลม 360°
ธาตุกัมมันตภาพรังสีที่ใช้
PIC18F252 - ไมโครคอนโทรลเลอร์ องค์ประกอบหลักของอุปกรณ์ของเรา
74LS373 (อะนาล็อกในประเทศ 555ИР22) - ทะเบียนสลักสำหรับควบคุม LED
พัดลมคอมพิวเตอร์ (3800 รอบต่อนาที) - ฉันเลือกพัดลมที่มีตัวควบคุมความเร็วและพลังงานในตัว เอฟเฟกต์ POV ต้องใช้พัดลมที่มีความเร็วการหมุนอย่างน้อย 3600 รอบต่อนาที
LED อินฟราเรดและโฟโตทรานซิสเตอร์ - องค์ประกอบเหล่านี้คู่หนึ่งได้รับการออกแบบมาเพื่อติดตามจุดศูนย์ เมื่อใบพัดข้ามจุดศูนย์ การขัดจังหวะจะถูกกระตุ้นในไมโครคอนโทรลเลอร์ ทำให้โปรแกรมการแสดงภาพเริ่มต้นจาก 0°
นอกจากนี้ โครงการยังใช้:
ตัวแปลง 7805 +5V
ตัวเก็บประจุ 47uF
ควอทซ์ 40 เมกะเฮิรตซ์
ตัวต้านทาน 2x330
ไฟ LED สีเขียว 16x
ไออาร์ไดโอด
โฟโต้ทรานซิสเตอร์
คณะกรรมการขนมปัง
การเชื่อมต่อสายไฟ
ที่ใส่แบตเตอรี่ 9V
โปรแกรมเมอร์ PICkit2
แผนภาพวงจร POV
วงจรของอุปกรณ์ไม่ซับซ้อนและมีส่วนประกอบหลัก 3 ส่วน ได้แก่ ตัวแปลง 7805 ในแหล่งจ่ายไฟ ไมโครคอนโทรลเลอร์ PIC18F252 และรีจิสเตอร์ 74LS373 เพื่อควบคุม LED และไดโอด IR และโฟโตทรานซิสเตอร์สำหรับติดตามจุดศูนย์

สั้น ๆ เกี่ยวกับโมดูลหลักของอุปกรณ์:
แหล่งจ่ายไฟ
เราได้รับ +5V มาตรฐานสำหรับการจ่ายไฟให้กับไมโครคอนโทรลเลอร์ผ่านคอนเวอร์เตอร์ LM7805 (ตัวเรือน T220) ตัวเก็บประจุเอาต์พุตทำหน้าที่กรองแรงดันไฟกระชาก
การควบคุมแอลอีดี
PIC18F252 ใช้บัสข้อมูล 8 บิตพร้อมสายควบคุม 74LS373 2 เส้นที่เปิดหรือปิด LED ขึ้นอยู่กับข้อมูลที่เข้ามา ด้วยการออกแบบวงจรนี้ สามารถควบคุมไมโครวงจร 74LS373 ได้เพียงวงจรเดียวในคราวเดียว ดังนั้นไฟ LED จะไม่สว่างขึ้นด้วยการซิงโครไนซ์ 100%
การติดตามจุดศูนย์
การซิงโครไนซ์ภาพดำเนินการโดยใช้จุดศูนย์ซึ่งติดตามโดยใช้ไดโอด IR และโฟโตทรานซิสเตอร์ เมื่อแสงจากไดโอดตกกระทบทรานซิสเตอร์ แสงจะเปิดขึ้น และ +5V จากตัวสะสมจะไปที่ +0V ของตัวปล่อย ตัวควบคุม PIC ตรวจจับการสลายตัวของสัญญาณและรันโปรแกรมส่งคืนศูนย์
เกี่ยวกับชิป 74LS373
ชิป 74LS373 (อะนาล็อกในประเทศ 555ИР22) เป็นแลตช์รีจิสเตอร์ที่มีสถานะเอาต์พุตสามสถานะ โดยมี D-flip-flop 8 ตัว เอกสารข้อมูล PDF

ฉันใช้ชิปนี้เป็นไดรเวอร์ LED เอาต์พุต m/s จะเปิดหรือปิดไฟ LED ที่เกี่ยวข้อง แต่ละ m/s มีอินพุตควบคุม 2 ช่อง: LE (เปิดใช้งานสลัก) และ OE (เปิดใช้งานเอาต์พุต) ด้านล่างนี้ ฉันจะอธิบายโดยย่อถึงวิธีใช้อินพุตเหล่านี้ในโครงการของเรา
เปิดใช้งานเอาต์พุต (OE)- เชื่อมต่อ/ตัดการเชื่อมต่อเอาต์พุตของไมโครวงจร ทางเข้าจะกลับด้าน หากอินพุตเป็น 1 แสดงว่าเอาต์พุตมีสถานะความต้านทานสูง หากอินพุตเป็น 0 ข้อมูลจะถูกถ่ายโอนจากอินพุตไปยังเอาต์พุต (ดูตารางความจริงในแผ่นข้อมูล)
เปิดใช้งานสลัก (LE)- อินพุต ขึ้นอยู่กับสถานะที่ m/s จะบันทึกสถานะปัจจุบันของเอาต์พุต หรือตั้งค่าสถานะใหม่ของเอาต์พุต ขึ้นอยู่กับข้อมูลที่อินพุต หากอินพุต LE ทำงานอยู่ (โลจิคัล 1 ที่อินพุต) ข้อมูลจะถูกถ่ายโอนจากอินพุตไปยังเอาต์พุตอย่างอิสระ หากอินพุตเป็น 0 แสดงว่าไม่มีการส่งข้อมูล และสถานะเอาต์พุตจะขึ้นอยู่กับค่าก่อนหน้าของอินพุต
การคำนวณเวลา POV
ในการแสดงข้อมูลที่สอดคล้องกันที่ตำแหน่ง POV เราต้องคำนวณเวลาและความล่าช้าทั้งหมดอย่างแม่นยำ โชคดีที่ PIC มีตัวจับเวลาในตัวซึ่งเป็นสิ่งที่เราจะใช้
ความเร็วพัดลม = 3800 รอบต่อนาที
ลองหาความถี่การหมุนต่อวินาที 3800/60 = 63.3333 รอบต่อนาที
1 วงกลมเต็ม = 1/63.3333 = 0.015789 วินาที
การหมุน 1° = 0.015789/360 = 0.000043859 วินาที
ความถี่การดำเนินการคำสั่ง 40 MHz/4 = 10 MHz
คำแนะนำต่อการหมุน 1° = 43.86 µs/10000000 = 438.6
นั่นคือคำสั่ง 438 คำสั่งสำหรับทุกๆ 1° ของการหมุน
ที่. เมื่อรู้ความเร็วพัดลม เราก็สามารถหาเวลาในการหมุนได้ 1° เราได้ค่า 43.86 µs นี่จะเป็นช่วงเวลาในการเรียกไมโครคอนโทรลเลอร์ขัดจังหวะตามที่สถานะของ LED จะได้รับการอัปเดต เพื่อให้ได้ภาพที่สมบูรณ์ เราจะต้องแสดงสถานะ LED ของแต่ละมุม 360 องศา
การติดตามตำแหน่งเป็นศูนย์
เพื่อให้โปรเจ็กต์ POV ของเราแสดงภาพได้แม่นยำยิ่งขึ้น ฉันใช้การควบคุมจุดศูนย์โดยใช้ IR LED และโฟโต้ทรานซิสเตอร์ เมื่อผ่านจุด 0° รูปภาพจะถูกรีเซ็ตและเริ่มวงจรใหม่
วิดีโอด้านบนแสดงตัวอย่างวงจรอย่างง่ายโดยใช้ IR LED เมื่อเปิด IR LED โฟโต้ทรานซิสเตอร์จะตรวจจับการแผ่รังสีและปิดไฟ LED สีแดง หลักการเดียวกันนี้ใช้ในโครงการของเราเพื่อตรวจจับตำแหน่งศูนย์

ภาพด้านบนแสดงให้เห็นว่าการติดตามจุดศูนย์ถูกนำมาใช้ในโครงการ POV ของเราอย่างไร เมื่อใดก็ตามที่ใบพัดเคลื่อนผ่าน IR LED ทรานซิสเตอร์จะเปิดขึ้นเพื่อเชื่อมต่อ +5V จากตัวรวบรวมไปยังกราวด์ของตัวปล่อย ไมโครคอนโทรลเลอร์ PIC ตรวจจับการเปลี่ยนแปลงสถานะนี้และอื่นๆ กำหนดจุดศูนย์
การผลิตแท่นใบพัด
ในภาพด้านล่าง ฉันได้รวบรวมชิ้นส่วนทั้งหมดที่เราต้องสร้าง POV แล้ว ไม่แสดงเฉพาะแหล่งจ่ายไฟสำหรับพัดลมและไดโอด IR

ก่อนอื่นเราต้องติดพัดลมเข้ากับฐานโดยใช้โบลต์และน็อต 4 ตัว

ในการดำเนินการนี้ ให้เจาะรูสี่รูที่ฐานและยึดพัดลมไว้ตรงกลางฐาน

เราติดไม้อัดชิ้นเล็ก ๆ เข้ากับพัดลมโดยใช้กาวหรืออีพอกซี

เราตัดใบพัดลมและติดที่ใส่แบตเตอรี่ขนาด 9 โวลต์


เราเจาะรูสี่รูบนกระดานแล้วยึดเข้ากับแกนไม้อัด 4 อัน เราพยายามรักษาสมดุล


เราคลายเกลียวบอร์ดแล้วทำให้มันเป็นรูปสี่เหลี่ยมผืนผ้า จากนั้นเราก็แนบมันอีกครั้ง

เค้าโครงของส่วนประกอบวิทยุ
เมื่อจัดเรียงชิ้นส่วนบนกระดาน จะต้องรักษาสมดุลเพื่อไม่ให้เกิดความไม่สมดุลเมื่อหมุน พยายามวางชิ้นส่วนให้ใกล้กับศูนย์กลางและเท่าๆ กัน ในอนาคต คุณสามารถติดตุ้มน้ำหนักเข้ากับกระดานเพื่อปรับสมดุลได้ (ฉันทำแบบนั้นโดยติดเหรียญสองเหรียญ)
บนเขียงหั่นขนม ฉันใช้การติดตั้งแบบหุ้มลวด ซึ่งเรียกว่าวิธีการแบบเก่า ฉันใช้ซ็อกเก็ตสำหรับไมโครวงจร

ในการเริ่มต้น ฉันวางซ็อกเก็ตและส่วนประกอบกันโคลงทั้งหมดไว้

ขั้นตอนต่อไปคือการวาง LED ไว้ในแถวเดียวที่ฝั่งตรงข้ามของบอร์ด

หลังจากติดตั้งทุกอย่างแล้ว ให้บิดหรือประสานพินทั้งหมดตามแผนภาพวงจร POV

ก่อนอื่น ฉันเชื่อมต่อไมโครคอนโทรลเลอร์ PIC และฟลิปฟล็อป

จากนั้น ฉันเชื่อมต่อ LED เข้ากับแหล่งพลังงานและวงจรควบคุม

ขั้นตอนสุดท้ายคือการติด LED อินฟราเรดเข้ากับฐาน

IR LED ต้องได้รับการแก้ไขอย่างแน่นหนา

และควรวางไว้ตรงข้ามโฟโต้ทรานซิสเตอร์บนบอร์ด

โครงการ POV ของเราใกล้จะพร้อมแล้ว!

สิ่งที่เหลืออยู่คือการอัพโหลดเฟิร์มแวร์และทดสอบ
ซอฟต์แวร์
หน้าที่หลักในโปรแกรมคือ:
- ลำดับความสำคัญสูง RB0 ขัดจังหวะ
- ตัวจับเวลาลำดับความสำคัญต่ำ 0 ขัดจังหวะ
การขัดจังหวะ RB0 ที่มีลำดับความสำคัญสูง
งานของฟังก์ชันขัดจังหวะที่มีลำดับความสำคัญสูงนี้คือการรีเซ็ตตัวจับเวลา 0 และเริ่มเอาท์พุตไปยัง LED ตั้งแต่ต้น เมื่อสร้างเอฟเฟ็กต์ POV จะแสดงหลายครั้งต่อวินาที ตัวแปร led_count ใช้เป็นตัวนับอินเทอร์รัปต์ของตัวจับเวลาเพื่อทราบว่าเอาต์พุตใดถูกตั้งค่าให้เอาต์พุตไปยัง LED สำหรับการแสดงผล INT0 ก็ถูกรีเซ็ตเช่นกัน
ตัวจับเวลาลำดับความสำคัญต่ำ 0 ขัดจังหวะ
Void InterruptHandlerHigh() ( if(INTCONbits.INT0IF) //ตรวจสอบว่าตั้งค่าสถานะขัดจังหวะ INT0 หรือไม่ ( led_count = 325; WriteTimer0(0xFFE0); INTCONbits.TMR0IF = 0; //ล้าง TMR0 Flag INTCONbits.INT0IF = 0; ) INTCONbits กีห์ = 1; )
เมื่อถูกขัดจังหวะด้วย Timer0 ตัวแปร led_count จะลดลง เงื่อนไข if/else ใช้เพื่อส่งออกข้อมูลนาฬิกา/ข้อความ ฯลฯ
การทดสอบมุมมอง
เรามาถึงขั้นตอนสุดท้ายของโครงการ POV ของเราแล้ว สิ่งที่เหลืออยู่คือการเปิดตัวทุกอย่างและเพลิดเพลินไปกับเอฟเฟกต์ POV ในคลิปด้านล่างสามารถดูขั้นตอนการสร้างและทดสอบนาฬิกาใบพัดทั้งหมดได้
ช่วงเวลา 1° สามารถประมวลผลได้อย่างง่ายดายด้วย MK 40 MHz ที่. คุณสามารถแสดงทั้งข้อมูลกราฟิกและข้อความ ฉันคิดว่าหน่วยความจำแฟลชของไมโครคอนโทรลเลอร์เพียงพอสำหรับรูปแบบต่างๆ
โดยสรุป ฉันอยากจะบอกว่านี่เป็นโปรเจ็กต์ POV ที่เรียบง่ายมากที่คุณสามารถใช้เป็นพื้นฐานสำหรับ POV ที่ปรับปรุงแล้วของคุณได้ และมีบางอย่างที่ต้องปรับปรุงที่นี่: นี่อาจเป็นการใช้ไฟ LED RGB เพื่อให้ได้ภาพสีหรือการใช้แหล่งพลังงานเดียวสำหรับทั้งระบบ ฯลฯ ใบพัดนี้ใช้งานได้เพียงไม่กี่ชั่วโมงด้วยแบตเตอรี่ 9V
ดาวน์โหลดแหล่งที่มา
บทความต้นฉบับเป็นภาษาอังกฤษ (แปลโดย A.V. Koltykov สำหรับเว็บไซต์)
รายชื่อธาตุกัมมันตภาพรังสี
| การกำหนด | พิมพ์ | นิกาย | ปริมาณ | บันทึก | ร้านค้า | สมุดบันทึกของฉัน |
|---|---|---|---|---|---|---|
| ไมโครคอนโทรลเลอร์ | PIC18F252 | 1 | ไปยังสมุดบันทึก | |||
| สลักลงทะเบียน | SN74LS373 | 2 | 555IR22 | ไปยังสมุดบันทึก | ||
| ตัวควบคุมเชิงเส้น | LM7805 | 1 | ไปยังสมุดบันทึก | |||
| โฟโต้ทรานซิสเตอร์ | 1 | ไปยังสมุดบันทึก | ||||
| ตัวเก็บประจุด้วยไฟฟ้า | 47 ไมโครฟ | 1 | ไปยังสมุดบันทึก | |||
| ตัวต้านทาน | 47 โอห์ม | 1 | ไปยังสมุดบันทึก | |||
| ตัวต้านทาน |
วิดีโอนี้แสดงนาฬิกาที่น่าสนใจที่เรียกว่าใบพัด ใช้เวลาสามเย็นในการสร้าง ก่อนหน้านี้ไม่มีแผนภาพที่ดีของนาฬิกาเรือนนี้ ตอนนี้เมื่อพบวงจรที่ดีมาก เรียบง่าย และง่ายต่อการประกอบแล้ว มีโอกาสที่จะทำซ้ำอีกครั้ง แผนผังประกอบด้วยไฟล์ที่มีแผงวงจรพิมพ์ วงจรนาฬิกานั้นเรียบง่ายและสามารถเข้าถึงได้สำหรับนักวิทยุสมัครเล่นมือใหม่ที่สามารถสร้างแผงวงจรพิมพ์และแฟลชคอนโทรลเลอร์ได้
ส่วนประกอบวิทยุสามารถหาซื้อได้ในราคาถูกในร้านจีนแห่งนี้
ทำไมนาฬิกาถึงเรียกว่าใบพัด? การออกแบบนี้หมุนโดยพัดลมซึ่งก็คือตัวระบายความร้อนของคอมพิวเตอร์ อย่างที่คุณเห็นมีแผงควบคุมพร้อมไฟ LED บนโรเตอร์ พวกมันสร้างเอฟเฟกต์นาฬิกา ไฟ LED ถูกควบคุมโดยไมโครโปรเซสเซอร์ ซึ่งในบางช่วงเวลาจะทำให้ไฟ LED สว่างขึ้น และสร้างเอฟเฟกต์ภาพในพื้นที่ของหน้าปัด
ในวิดีโอภาพจะสั่นเล็กน้อยแต่นี่เป็นเพียงเอฟเฟกต์ของการบันทึกวิดีโอเท่านั้น ในความเป็นจริงทุกสิ่งส่องสว่างสดใสและชัดเจนโดยเฉพาะในความมืด
วิดีโอแสดงให้เห็นว่าคุณสามารถตั้งเวลาและควบคุมมอเตอร์ที่หมุน LED ได้อย่างถูกต้อง
ผลลัพธ์ที่ได้คือนาฬิกาที่สวยงามและน่าสนใจมากพร้อมกลไกและหลักการทำงานที่ไม่ธรรมดา เกี่ยวกับนาฬิกาออโตเมติก
นาฬิกาใบพัดบนเครื่องยนต์ฮาร์ดไดรฟ์
นาฬิกา LED ไดนามิกที่ผิดปกติซึ่งขับเคลื่อนโดยมอเตอร์จากฮาร์ดไดรฟ์
นาฬิกาใบพัด
แผนภาพอุปกรณ์:

แผนผัง รูปภาพ: 1

แผนภาพวงจรรูปถ่าย: 2

แผนผังรูปภาพ: 3

แผนผัง รูปภาพ: 4
เมื่อคลายข้อสงสัยทั้งหมดแล้ว เราก็มาเริ่มกันเลย...
ในการสร้างนาฬิกาใบพัดเราจะต้อง:
* ไฟเบอร์กลาส 2 แผ่น แผ่นหนึ่งเป็นแบบสองด้าน (45*120 มม.) และแผ่นที่สองเป็นแบบด้านเดียว (35*60 มม.)
* เหล็กและเฟอร์ริกคลอไรด์ (สำหรับกัดกระดาน)
* มอเตอร์จากไดรฟ์ HDD
* หัวแร้งบัดกรีปลายบาง สว่านขนาดเล็ก
สำหรับนาฬิกา:
* ไดรเวอร์ LED MBI5170CD(SOP16, 8 บิต) – 4 ชิ้น
* นาฬิกาเรียลไทม์ DS1307Z/ZN(SMD, SO8) – 1 ชิ้น
* ไมโครคอนโทรลเลอร์ ATmega32-16AU (32K Flash, TQFP44, 16MH) – 1 ชิ้น
* เครื่องสะท้อนเสียงควอตซ์ 16MHz – 1 ชิ้น
* เครื่องสะท้อนเสียงควอตซ์ 32kHz – 1 ชิ้น
* เคอร์ ตัวเก็บประจุ 100nF (0603 SMD) – 6 ชิ้น
* เคอร์ ตัวเก็บประจุ 22pF (0603 SMD) – 2 ชิ้น
* เคอร์ ตัวเก็บประจุ 10mF*10v (0603 SMD) – 2 ชิ้น
* ตัวต้านทาน 10kOm (0603 SMD) – 5 ชิ้น
* ตัวต้านทาน 200Om (0603 SMD) – 1 ชิ้น
* ตัวต้านทาน 270Om (0603 SMD) – 1 ชิ้น
* ตัวต้านทาน 2kOm (0603 SMD) – 4 ชิ้น
* ถ่านนาฬิกาและที่ใส่
* อินฟาเรด LED
* ทรานซิสเตอร์อินฟราเรด
* LEDs (0850) 33 ชิ้น (หนึ่งในนั้น (อันสุดท้าย) อาจมีสีอื่นได้)
สำหรับตัวขับมอเตอร์:
* ตัวขับมอเตอร์ TDA5140A – 1 ชิ้น
* โคลงเชิงเส้น 78M05CDT – 1 ชิ้น
* คาปาซิเตอร์ 100 mF ขั้ว (0603 SMD) – 1 ชิ้น
* เคอร์ ตัวเก็บประจุ 100 nF (0603 SMD) – 1 ชิ้น
* คาปาซิเตอร์ 10 mF ขั้ว (0603 SMD) – 2 ชิ้น
* เคอร์ ตัวเก็บประจุ 10 nF (0603 SMD) – 1 ชิ้น
* เคอร์ ตัวเก็บประจุ 220 nF (0603 SMD) – 1 ชิ้น
* 20 nF – 2 ชิ้น
* ตัวต้านทาน 10 kOm (0603 SMD) – 1 ชิ้น
1) ก่อนอื่นเราต้องสร้างบอร์ด 2 อัน

มุมมองด้านล่างของแผงวงจรพิมพ์

มุมมองด้านบนของแผงวงจรพิมพ์
2) เรากำลังมองหาฮาร์ดไดรฟ์เก่าที่ไม่จำเป็นเพื่อถอดมอเตอร์ออกจากนั้น ในฮาร์ดไดรฟ์บางตัวมอเตอร์ไม่ได้ติดด้วยสลักเกลียว แต่ถูกกดเข้าไปในเคส ให้ใส่ใจกับสิ่งนี้เมื่อเลือกฮาร์ดไดรฟ์ มิฉะนั้นคุณจะ ต้องตัดมันออก :)
โครงการอิเล็กทรอนิกส์ที่แปลกประหลาดมากมายสามารถพบได้บนอินเทอร์เน็ต ซึ่งทำให้จิตใจที่อยากรู้อยากเห็นไม่หยุดพัก
และแม้ว่า "นาฬิกาใบพัด" จะห่างไกลจากสิ่งใหม่บนเว็บขนาดใหญ่ แต่วันหนึ่งเมื่อฉันพบแผนภาพของนาฬิกาที่มีเอฟเฟกต์สโตรโบสโคปิก ฉันก็ไม่สามารถผ่านไปได้
ทฤษฎีเล็กน้อย
แนวคิดหลักของอุปกรณ์คือการควบคุมไมโครคอนโทรลเลอร์ของกลุ่ม LED ที่ติดตั้งบนฐานหมุนอย่างรวดเร็ว
รหัสระบุการวนซ้ำที่ทำซ้ำจากการขัดจังหวะภายนอก สมมติว่าความยาวของการระเบิดทั้งหมดคือ 15 ms ในช่วงเวลานี้ ไฟ LED แต่ละดวงจะสว่างขึ้น n จำนวนครั้ง ที่ความเร็วการหมุนต่ำ สายตามนุษย์จะตรวจจับการเปิดสวิตช์ LED ทั้งหมดในคราวเดียวเท่านั้น แต่ทันทีที่ความเร็วในการหมุนเพิ่มขึ้น ช่วงเวลาเล็กๆ ของการระเบิดโดยรวมจะเริ่มยืดออกไปตามแกน X และดวงตาจะเริ่มตรวจจับการกระตุ้นที่ไม่พร้อมกัน สิ่งนี้จะดำเนินต่อไปจนกระทั่งถึงความเร็วการหมุนที่จำกัด โดยที่ช่วงเวลา 15 ms จะถูกหมุนไปเป็นความยาวที่แน่นอนตามแกน X ซึ่งช่วงเวลาการกะพริบภายในการระเบิดโดยรวมจะมองเห็นได้ชัดเจน และตัวเลขจะถูกวาดที่จะบวก จนถึงภาพรวม. ความเร็วในการหมุนที่เพิ่มขึ้นอีกจะส่งผลให้แพ็กเก็ตพัลส์ทั้งหมดยืดออก และตัวเลขจะไม่สามารถอ่านได้
บอร์ดได้รับการออกแบบใหม่สำหรับส่วนประกอบ SMD เพราะยิ่งบอร์ดมีน้ำหนักเบา ภาระของพัดลมก็จะน้อยลง
ส่วนที่หมุนได้ประกอบด้วยแผงวงจรหลักและแผงแสดงสถานะที่ติดตั้ง LED

ฉันใช้ไดโอด SS12 Schottky เป็นไดโอดเรียงกระแส ฉันบัดกรีซ็อกเก็ต 18 พินไว้ใต้ไมโครคอนโทรลเลอร์ เนื่องจากจำเป็นต้องมี "การสตาร์ทโดยไม่ได้ใช้งาน"
ความยาวของแขนสามารถปรับได้ตามรสนิยมโดยคำนึงถึงการรับชมส่วนที่ส่องสว่างอย่างสะดวกสบาย ในความคิดของฉัน การสแกน 90-110 องศาเหมาะสมที่สุด ตัวเลือกการสแกนที่น้อยกว่า 90 องศาจะทำให้ตัวเลขสับสน และการที่มากกว่า 110 องศาจะทำให้รูปภาพมีเส้นผ่านศูนย์กลางมากเกินไป
ตอนแรกฉันเลือกความยาวไหล่ 65 มม. แต่ประสบการณ์ไม่ประสบผลสำเร็จและตัดกระดานที่เสร็จแล้วออกเป็น 45 มม.
บอร์ด LED มีลักษณะดังนี้:

มีไฟ LED หลัก 7 ดวงและไฟแบ็คไลท์ 2 ดวง ไฟ LED ทั้งหมดมีเส้นผ่านศูนย์กลาง 5 มม.
การเชื่อมต่อระหว่างสองบอร์ดทำได้โดยการบัดกรีแผ่นเชื่อมต่อ ฉันแกะสลักบอร์ด ทำการติดตั้ง และเชื่อมต่อเข้าด้วยกัน ตอนนี้คุณต้องวางไว้บนโรเตอร์พัดลม
เมื่อต้องการทำเช่นนี้ ฉันเจาะ 3 รูโดยกางมุม 120 องศา

ฉันใส่สกรูหัวเทเปอร์ที่มีเส้นผ่านศูนย์กลาง 3 มม. และยาว 20 มม. เข้าไป ฉันขันมันด้วยน็อตและยึดกระดานไว้กับพวกมัน

ปลายของขดลวดทุติยภูมิถูกบัดกรีเข้ากับบอร์ด ฉันติดตั้งเครื่องถ่วงน้ำหนักชดเชยไว้ที่ฝั่งตรงข้ามของบอร์ดแสดงผลเพื่อลดการเต้นระหว่างการหมุน
ถึงเวลาแล้วสำหรับการทำงานโดยไม่ได้ใช้งานโดยไม่ต้องใช้ไมโครคอนโทรลเลอร์ ฉันวางโรเตอร์โดยวางแผงวงจรไว้บนพัดลมและจ่ายพลังงานให้กับเครื่องกำเนิด HF พัดลมยังคงไม่เคลื่อนไหว ไฟ LED แบ็คไลท์สว่างขึ้น ฉันตรวจสอบแรงดันไฟฟ้าขาเข้า มันลดลงเหลือ 10 โวลต์ ซึ่งเป็นเรื่องปกติ ยังคงต้องติดตั้งออปโตคัปเปลอร์แบบซิงโครไนซ์ซึ่งประกอบด้วยโฟโตไดโอดอินฟราเรดและ LED อินฟราเรด IR LED ติดอยู่ที่ฐานของพัดลมและจ่ายไฟจากแหล่งจ่ายไฟหลัก +12 V ผ่านตัวต้านทาน 470 โอห์ม โฟโตไดโอด IR ปกติจะถูกบัดกรีลงบนบอร์ด
ฉันติดตั้งออปโตคัปเปลอร์เพื่อให้เมื่อหมุนโฟโตไดโอดจะลอยอยู่เหนือ LED ให้ใกล้ที่สุด

ฉันตั้งโปรแกรมไว้
ฉันติดตั้งตัวควบคุมในซ็อกเก็ตและยึดโรเตอร์ด้วยแหวนยึด

ถึงเวลาเปิดตัวแล้ว!
การรวมครั้งแรกทำให้ฉันมีความสุขและเศร้าในเวลาเดียวกัน วงจรใช้งานได้ไฟ LED แสดงเวลา 12:00 น. ตามที่ควรจะเป็น แต่ภาพเบลอตามแกน X ฉันเริ่ม "การซักถาม" ด้วยเหตุนี้ฉันจึงได้ข้อสรุปว่าจำเป็นต้อง เปลี่ยนโฟโตไดโอด การแพร่กระจายของพื้นที่ตอบสนองจากการหยุดชะงักภายนอกของ MK กลายเป็นเรื่องใหญ่เกินไป
ฉันตัดสินใจติดตั้งโฟโตไดโอดที่มีรูปแบบการแผ่รังสีที่แคบกว่าและปิด LED ด้วยเทปพันสายไฟสีดำด้วย

พื้นที่กระตุ้นลดลง 2-3 เท่าและการเปิดใช้งานครั้งต่อไปก็น่าพอใจ: ความเบลอหายไปจนหมด
ฉันขอทราบอีกครั้งว่าพัดลมที่ใช้พลังงานต่ำจะไม่เร่งการออกแบบนี้ตามความเร็วการหมุนที่ต้องการและภาพจะกะพริบต่อหน้าต่อตาคุณ ฉันปรับปรุงโปรเจ็กต์สามครั้งและเฉพาะเวอร์ชันบนพัดลมที่มีพารามิเตอร์ 0.4 A; 4.8 วัตต์; 3200 รอบต่อนาทีทำงานได้ดี
ข้อเสียที่ชัดเจนของการออกแบบคือการไม่มีแหล่งจ่ายไฟสำรองของคอนโทรลเลอร์ ใช่ ใช่ เวลาจะถูกรีเซ็ตทุกครั้งที่ถอดแหล่งจ่ายไฟ +12V หลักออก