Atmega8'de saat pervanesi. POV - saat pervanesi pic16f628a DIY şemalarında saat pervanesi
Herkese selam! Atmega8 kontrol cihazına monte ettiğim basit bir pervane saatine dikkatinizi çekmek istiyorum. Uygun fiyatlı parçalardan yapılmıştır ve çoğaltılması ve yapılması kolaydır. Tek şey, saat denetleyicisini ve kontrol panelini yakmak için bir programlayıcıya ihtiyacınız olmasıdır.
Saati temel almak için geleneksel bir 120 mm fan (soğutucu) kullanıldı. Bu saat için herhangi bir fanı hem saat yönünde hem de saat yönünün tersine döndürerek kullanabilirsiniz, çünkü bu saati toplarken programı biraz yeniden düzenledim ve uzaktan kumandadan programlı olarak sembollerin görüntüsünü değiştirdim.
Saatin devresi oldukça basittir ve senkronizasyonu için 32768 Hz frekanslı saat kuvarsının kullanıldığı Atmega8 mikrodenetleyici üzerine monte edilmiştir.
Saat, enerjisi bir verici bobini olan bir jeneratörden aktarılan bir alıcı bobin tarafından çalıştırılır. Bu bobinlerin her ikisi de bir hava transformatörü oluşturur.

Jeneratörün şeması ve tasarımı ile özel bir problem yoktu, çünkü bir plazma topundan bir jeneratör kullanıldı.

Jeneratör, ortak bir TL494 yongası üzerine monte edilmiştir ve çıkış darbelerinin genişliğini ve frekansını geniş bir aralıkta değiştirmenize olanak tanır.
Bobinler arasında bir santimetre boşluk olsa bile, voltaj saati başlatmak için yeterlidir. Sadece bobinler arasındaki boşluk ne kadar büyük olursa, darbe genişliğinin o kadar büyük yapılması gerektiği ve buna bağlı olarak kaynaktan akım tüketiminin de arttığı dikkate alınmalıdır.

Jeneratörü ilk kez açtığınızda, darbe genişliğini (görev döngüsü) minimuma ayarlayın (regülatör düğmesi şemaya göre üst konumdadır, yani 4. ayak R7 direnci üzerinden çekilir. TL-494'ün 14., 15., 2. ayağı). Jeneratörün frekansını gıcırtı kaybolana kadar çeviriyoruz, bu yaklaşık 18-20 kHz (kulakla) ve frekansı ölçecek bir şey varsa o zaman bu sınırlar dahilinde ona göre ayarlıyoruz.
Jeneratör kartında, LM317'de ayrıca fan hızını ayarlamak için tasarlanmış bir voltaj regülatörü monte edilmiştir.
Diyagramda yok, bitirmedim
. Saatin çalışırken demo videosunu izleyin.
Video.
Saat panosunun kendisi fanın tabanına takılıdır. Çift taraflı bantla sabitledim.

Sonra saat devresini bir fotodirençten kızılötesi fotodiyoda biraz yeniden düzenledim (aşağıdaki şekil).
Vericide artık basit bir LED yerine kızılötesi var.
2k yerine direnç 100k koydu.

Saat imalatındaki sorumlu anlar, bir hava transformatörünün imalatı ve saat panosunun fanın tabanında hizalanması (veya daha doğrusu dengelenmesi).
Bu anları ciddiye alın.
Hava transformatörü.
Temel olarak bronz burçlu 120 mm'lik normal bir soğutucu aldım. Saat tahtası çift taraflı bant ile tabana yapıştırılmıştır.
Bıçakları soğutucudan ısırıp öğütüyoruz ve bir dosya, zımpara kağıdı ile düzleştiriyoruz. Bobinler, bir kablo kanalından bir çerçeve üzerinde yapılır. Böyle bir tasarım aklıma gelmedi, sadece bu fikri internetten aldım. Transformatörü sarmak için bir kablo kanalından bir taban yapılır. Her 5 mm'de bir kanalın kenarlarında bir kesi yapıyoruz ve dikkatlice bir daire şeklinde katlıyoruz, fanın plastik tabanına tam oturacak şekilde çapı seçiyoruz.

Daha sonra, kablo kanalından mandrel üzerine, 0,25 çapında 100 tur emaye tel sarıyoruz.
Birleştirilmiş transformatörün akım tüketimi, 200 mA aldım (bu, bobinler arasında oldukça belirgin bir boşlukla).
Genelde fan motoru ile birlikte 0.4-0.5A civarında akım tüketimi elde edilir.
Primer (verici) bobini de yapıyoruz ama bobinler arasında minimum boşluk bırakmaya çalışıyoruz. Verici bobin ayrıca 100 tur tel 0.3 içerir (aynı 0.25'i kullanabilirsiniz).
Diyagramda, bu bobinler için biraz farklı sarım verilerim var.

Saat ücreti.
LED'li çubuk fiberglastan yapılmıştır. İçine bir delik açılır, bu deliğe teleskopik bir antenden bir tüp parçası sokulur ve tahtaya lehimlenir (anten tüpü parlak kaplamadan temizlenmelidir). Herhangi bir uygun tüpü kullanabilir veya kartı başka bir şekilde, örneğin somunlu bir vida kullanarak takabilirsiniz.
LED'li kartı sıradan bir emaye (sarma) tel ile saat kartına bağladım, montaja göre daha sert ve dönüş sırasında yıpranmaz.

Tüm levhayı dengelemek için, diğer tarafta 3-4 mm çapında bir vidayı sıcak tutkalla yapıştırıyoruz, diğer taraftaki vidaya çeşitli somunlar vidalıyoruz - minimum titreşim elde ediyoruz.
Saat panosunun performansını kontrol etmek için - LED'ler yanıp sönmesi gerekirken fotodirenci bir tornavida, cımbızla kısaltıyoruz.
Atmeganın 5. ayağında 5V (mantıksal birim) göründüğünde saat çalışmaya başlar. Yani fotodirenç yandığında 5. bacakta 5V olmalı,
Fotodirenç yanmıyorken atmeganın 5. ayağında mantıksal bir 0 (yaklaşık 0V) olmalı, bunun için 5. ayaktan toprağa bir direnç seçiyoruz. Diyagram 2 kOhm, bende 2,5 kOhm var.
Altta, fanın tabanında, LED'i, fan motorunun her dönüşünde fotodirenç ışık kaynağına (LED) olabildiğince yakın geçecek şekilde yapıştırıyoruz.
Uzaktan kumanda.
Kontrol paneli, saatin çalışmasını kontrol etmek, göstergeye göre ekran modlarını değiştirmek (fanın dönüş yönünü değiştirmek), saati ayarlamak için tasarlanmıştır.
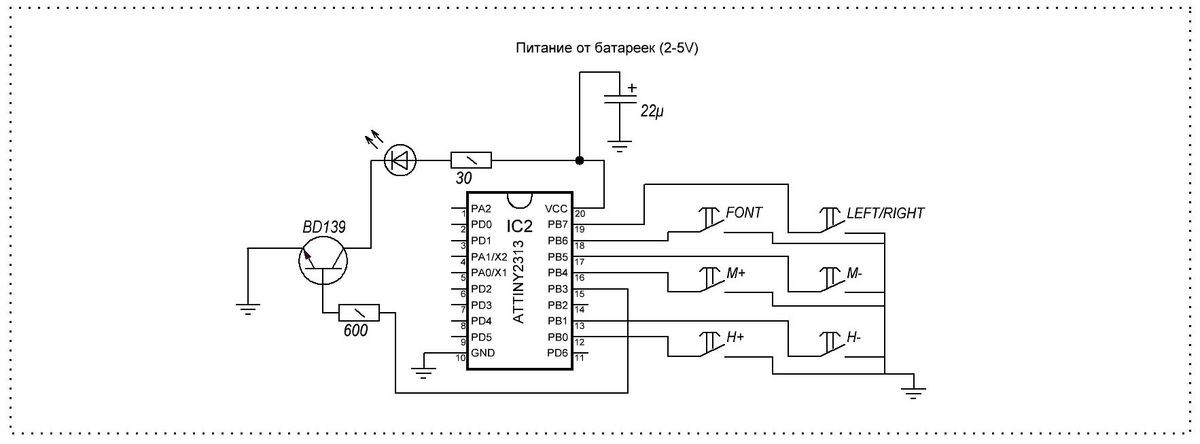
Uzaktan kumanda devresi bir ATTINY2313 mikrodenetleyici üzerine monte edilmiştir. Tahtada, MK'nin kendisi, saati kontrol etmek için tasarlanmış bir kayış ve altı düğme ile kurulur.

Uzaktan kumanda için kasayı monte etmedim, bu yüzden sadece kartın kendisinin bir fotoğrafı.

Uzaktan kumanda düğmelerinin amacına ilişkin bilgiler;
H+ ve H- saat ayarı
M+ ve M- dakika ayarı
R/L yön değişimi (saat yönünde ve saat yönünün tersine vidalar için)
yazı tipi yazı tipi değişikliği (ince, kalın ve yazıtlı web sitesi)
siteyi H + ve H düğmeleriyle etiketlerken - etiketin genişliği ayarlanır.
Ekteki arşiv, saati kurmak için gerekli tüm dosyaları içermektedir;
makale için arşiv
Saat tasarımı hakkında herhangi bir sorunuz varsa, bunları forumda sorun, mümkün olduğunca yardımcı olmaya ve sorularınızı yanıtlamaya çalışacağım.
Sabit sürücüden bir motorda olağandışı dinamik LED saat.

Cihaz Şeması:




Pekala, tüm şüpheler bir kenara bırakıldığında başlayabiliriz ...
Bir pervane saati yapmak için şunlara ihtiyacımız var:
* 2 yaprak fiberglas, biri çift taraflı(45*120mm) ve ikincisi tek taraflı(35*60mm).
* Demir ve ferrik klorür (aşındırma tahtaları için).
* HDD sürücüsünden motor.
* İnce uçlu, mini matkaplı havya.
izlemek için:
* Sürücü LED'i MBI5170CD(SOP16, 8 bit) - 4 adet.
* Gerçek zamanlı saat DS1307Z/ZN(SMD, SO8) - 1 adet.
* Mikrodenetleyici ATmega32-16AU (32K Flaş, TQFP44, 16MH) - 1 adet.
* Kuvars rezonatörler 16MHz - 1 adet.
* Kuvars rezonatörler 32kHz - 1 adet.
*Ker. kapasitör 100nF (0603 SMD) - 6 adet.
*Ker. kapasitör 22pF (0603 SMD) - 2 adet.
*Ker. kondansatör 10mF*10v (0603 SMD) - 2 adet.
* Direnç 10kOm (0603 SMD) - 5 adet.
* Direnç 200Om (0603 SMD) - 1 adet.
* Direnç 270Om (0603 SMD) - 1 adet.
* Direnç 2kOm (0603 SMD) - 4 adet.
* Bunun için pili ve tutucuyu izleyin
* Kızılötesi LED
* Kızılötesi transistör
* LED'ler (0850) 33 adet (biri (sonuncusu) farklı renkte olabilir)
Motor sürücüsü için:
* TDA5140A motor sürücüsü - 1 adet.
* Lineer sabitleyici 78M05CDT - 1 adet.
* Kondansatör 100 mF polar (0603 SMD) - 1 adet.
*Ker. kapasitör 100 nF (0603 SMD) - 1 adet.
* Kondansatör 10 mF polar (0603 SMD) - 2 adet.
*Ker. kapasitör 10 nF (0603 SMD) - 1 adet.
*Ker. kapasitör 220 nF (0603 SMD) - 1 adet.
* 20 nF - 2 adet.
* Direnç 10 kOm (0603 SMD) - 1 adet.
1) İlk önce 2 pano yapmamız gerekiyor.


2) Motoru ondan çıkarmak için gereksiz eski bir sabit sürücü arıyoruz, bazı sabit sürücülerde motor cıvatalarla sabitlenmez, kasaya bastırılır, sabit sürücü seçerken buna dikkat edin, aksi takdirde kesmek lazım :)
Bu pervane saati projesinde, sözde POV kullanılır ( P sebat Ö F v ision)-efekt veya Rusça konuşma: kalıcılık etkisi. Etki, beynimizin ve gözlerimizin hızla değişen (hareket eden veya titreyen) resimleri tek bir görüntüde birleştirme yeteneğine dayanır. Örneğin, sinematik etki buna dayanmaktadır.
YouTube'da birçok farklı POV efektli video var, ancak aralarında bu tür cihazları kendi ellerinizle nasıl yapacağınıza dair çok az bilgi var. Aşağıdaki projede, bir POV cihazı oluşturma sürecini anlatmaya çalışacağım.


Projenin amaç ve hedefleri
Bu projenin amacı, optik bir yanılsama yaratmak için POV kullanarak tek renkli bir pervane saati yaratmaktır. Cihaz görüntüyü (daha doğrusu belli bir noktadaki parçasını) 0°'den 360°'ye kadar tüm daire üzerinde 1° hassasiyetle göstermelidir. Bir IR alıcısı ile eşleştirilmiş bir IR vericisi, pervanenin konumunu izlemek için bir sıfır noktası oluşturur.
POV cihazımız iki güç kaynağı kullanır: biri pervane kartında bulunur, ikincisi pervaneyi döndüren motoru kontrol eder. POV'un çalışma prensibi şu şekilde olacaktır: sıfırdan başlayın, ardından pervanenin 360°'lik bir daire içindeki konumuna bağlı olarak her 1°'de bir yanacaktır.
Kullanılan radyo elemanları
PIC18F252 - mikrodenetleyici. Cihazımızın ana unsuru.
74LS373 (yerel analog 555IR22) - LED kontrolü için mandal.
Bilgisayar fanı (3800 rpm) - Dahili hız ve güç denetleyicisi olan bir fan seçtim. POV efekti, en az 3600 rpm dönüş hızına sahip bir fan gerektirir.
Kızılötesi LED ve fototransistör - bu elemanların bir çifti sıfır noktasını izlemek için tasarlanmıştır. Pervane sıfır noktasını geçtiğinde, görselleştirme programının 0 ° 'den başladığı mikrodenetleyicide bir kesinti tetiklenir.
Ayrıca, proje şunları kullanır:
7805 +5V dönüştürücü
47 uF kapasitör
40 MHz kuvars
2x 330 direnç
16x yeşil LED
IR diyot
Fototransistör
ekmek tahtası
Bağlantı telleri
9V pil tutucu
PICkit2 programcısı
POV devre şeması
Cihaz devresi basittir ve üç ana bileşen içerir: güç kaynağında bir 7805 dönüştürücü, LED'leri sürmek için bir PIC18F252 mikrodenetleyici ve bir 74LS373 kaydı ve sıfır noktası takibi için bir IR diyot ve fototransistör.

Cihazın ana modülleri hakkında kısaca:
Güç kaynağı
Mikrodenetleyiciye güç sağlamak için standart + 5V, LM7805 dönüştürücü (T220 kasası) aracılığıyla elde edilir. Çıkış kondansatörü voltaj dalgalanmalarını filtrelemek için kullanılır.
LED kontrolü
PIC18F252, gelen verilere göre LED'leri açan veya kapatan 2 74LS373 kontrol hattına sahip 8 bitlik bir veri yolu kullanır. Bu devre tasarımı ile aynı anda sadece bir adet 74LS373 chip kontrol edilebildiği için LED'ler %100 senkron olarak yanmamaktadır.
Sıfır noktası takibi
Görüntü senkronizasyonu, bir IR diyot ve bir fototransistör kullanılarak izlenen bir sıfır noktası kullanılarak gerçekleştirilir. Diyottan gelen ışık transistöre çarptığında açılır ve kollektörden gelen +5V, yayıcıdan +0V'a gider. PIC denetleyicisi, sinyal bozulmasını algılar ve sıfıra dönüş programını yürütür.
74LS373 çipi hakkında
Chip 74LS373 (yerel analog 555IR22), 8 D-flip-flop içeren, üç çıkış durumuna sahip bir mandaldır. Veri sayfası PDF'si.

Bu çipi bir LED sürücüsü olarak kullandım. m/s çıkışları ilgili LED'leri açar veya kapatır. Her m/s'nin iki kontrol girişi vardır: LE (Kilit Etkin) ve OE (Çıkış Etkin). Aşağıda bu girdileri projemizde nasıl kullanacağımızı kısaca anlatacağım.
Çıkış Etkinleştirme (OE)- mikro devrenin çıkışını bağlar / bağlantısını keser. Giriş ters çevrilir. Giriş 1 ise, çıkış yüksek direnç durumuna sahiptir, giriş 0 ise, veriler girişten çıkışa aktarılır (veri sayfasındaki doğruluk tablosuna bakın).
Mandal Etkinleştirme (LE)- m / s'nin çıkışların mevcut durumunu kaydedeceği duruma bağlı olarak giriş veya girişteki verilere bağlı olarak çıkışların yeni bir durumunu ayarlayacaktır. LE girişi aktifse (girişte mantık 1), bu durumda veriler girişten çıkışa serbestçe aktarılır. Giriş 0 ise, hiçbir veri iletilmez ve çıkış durumu, girişlerin önceki değerine bağlıdır.
POV Zamanlamaları Hesaplama
İlgili verileri belirli bir POV konumunda görüntülemek için tüm zamanlamaları ve gecikmeleri çok doğru bir şekilde hesaplamamız gerekir. Neyse ki, PIC denetleyicisi, kullanacağımız yerleşik bir zamanlayıcı içerir.
Fan hızı = 3800 rpm
Saniyedeki dönüş hızını 3800/60 = 63.3333 rpm bulalım.
1 tam daire = 1/63,3333 = 0,015789 saniye
1° döndürme = 0,015789/360 = 0,000043859 saniye
Talimat yürütme frekansı 40 MHz/4 = 10 MHz
1° döndürme başına talimatlar = 43,86 µs/10000000 = 438,6
Her 1° dönüş için 438 komut vardır.
O. fan hızını bilerek 1° dönme süresini bulabiliriz. 43.86 µs değerini aldık, bu, LED'lerin durumunun güncelleneceği mikrodenetleyicinin çağrı kesme aralığı olacaktır. Resmin tamamını elde etmek için, 360 derecenin her biri için LED'lerin farklı bir durumunu göstermemiz gerekecek.
Sıfır Konum Takibi
POV projemizi resmin görüntülenmesinde daha doğru hale getirmek için, bir IR LED ve bir fototransistör ile sıfır noktası kontrolü kullandım. 0° noktası geçildikten sonra görüntü sıfırlanır ve yeni bir döngü başlar.
Yukarıdaki video, IR LED kullanan basit bir devre örneğini göstermektedir. IR LED'i yandığında, fototransistör radyasyonu algılar ve kırmızı LED'i kapatır. Projemizde sıfır konumunu tespit etmek için aynı prensip kullanılmaktadır.

Yukarıdaki resim, POV projemizde sıfır noktası izlemenin nasıl uygulandığını göstermektedir. Pervane IR LED'in üzerinden geçtiğinde, transistör, toplayıcıdan yayıcı zemine +5V bağlayarak açılır. PIC mikro denetleyicisi bu durum geçişini algılar ve böylece sıfır noktasını tanımlar.
Pervane platformunu yapmak
Aşağıdaki resimde, POV'u yapmak için ihtiyaç duyacağımız tüm parçaları topladım. Yalnızca fan ve IR diyot için güç kaynağı gösterilmez.

Öncelikle fanı tabana takmamız gerekiyor bunun için 4 adet civata ve somun kullanıyoruz.

Bunu yapmak için tabana dört delik açıp fanı tabanın ortasına sabitliyoruz.

Fana tutkal veya epoksi kullanarak küçük bir kontrplak parçası yapıştırıyoruz.

Fan kanatlarını kesin ve 9V pil yuvasını takın.


Tahtaya dört delik açıp 4 kontrplak saplamaya sabitliyoruz. Bir denge kurmaya çalışıyoruz.


Tahtayı sökün ve dikdörtgen yapın. Sonra tekrar takın.

Radyo bileşenlerinin yerleşimi
Parçaları tahtaya yerleştirirken, dönüş sırasında dengesizlik olmaması için denge korunmalıdır. Parçaları merkeze daha yakın ve eşit bir şekilde yerleştirmeye çalışın, ileride dengelemek için tahtaya ağırlık takabilirsiniz (bunu iki madeni para takarak yaptım).
Breadboard'da, eski okul yöntemi olarak adlandırılan tel sargı kullandım. Kullanılan fişler için yuvalar.

Başlangıç olarak, dengeleyicinin tüm soketlerini ve bileşenlerini yerleştirdim.

Bir sonraki adım, LED'leri kartın karşı tarafında bir sıra halinde yerleştirmektir.

Her şey kurulduktan sonra, tüm uçları POV devre şemasına göre bükün veya lehimleyin

İlk olarak, PIC mikrodenetleyicisini ve parmak arası terlikleri bağladım.

Ardından LED'leri güç kaynağına ve kontrol devresine bağladım.

Son adımda, kızılötesi LED'i tabana sabitledim.

IR LED'i çok sıkı bir şekilde sabitlenmelidir

Ve panodaki fototransistörün karşısına yerleştirilmelidir.

POV projemiz neredeyse hazır!

Bellenimi yüklemek ve test etmek için kalır
Yazılım
Programdaki ana işlevler şunlardır:
-Yüksek Öncelikli RB0 Kesintisi
-Düşük Öncelikli Zamanlayıcı0 Kesintisi
Yüksek Öncelikli RB0 Kesintisi
Bu yüksek öncelikli kesme işlevinin işi, timer0'ı sıfırlamak ve LED çıkışını baştan başlatmaktır. Bir POV efekti oluşturulduğunda, saniyede birçok kez görüntülenir. led_count değişkeni, görüntülenmek üzere LED'e hangi çıkışın verileceğini bilmek için bir zamanlayıcı kesme sayacı olarak kullanılır. INT0 da sıfırlanır.
Düşük Öncelikli Zamanlayıcı0 Kesintisi
Void InterruptHandlerHigh() ( if(INTCONbits.INT0IF) //INT0 kesme bayrağının ayarlanıp ayarlanmadığını kontrol edin ( led_count = 325; WriteTimer0(0xFFE0); INTCONbits.TMR0IF = 0; //Clear TMR0 Flag INTCONbits.INT0IF = 0; ) INTCONbits. GİH = 1; )
Timer0'dan kesinti olduğunda, led_count değişkeni azaltılır. if/else koşulu, saat verilerini/metnini vb. görüntülemek için kullanılır.
Bakış açısı testi
POV projemizde son aşamaya geldik. Geriye her şeyi çalıştırmak ve POV efektinin keyfini çıkarmak kalıyor. Aşağıdaki klipte prop-clock'un tüm yapım ve test aşamalarını görebilirsiniz.
1 ° 'lik aralıklar, 40 MHz MK'yi kolayca çalıştırmayı başarır. O. hem grafik bilgilerini hem de metni görüntüleyebilirsiniz, mikrodenetleyicinin flash belleğinin herhangi bir desen için yeterli olduğunu düşünüyorum
Sonuç olarak, bunun, herhangi bir geliştirilmiş POV'unuz için temel olarak kullanabileceğiniz çok basit bir POV projesi olduğunu söylemek isterim. Ve burada iyileştirilmesi gereken bir şey var: renkli bir görüntü üretmek için RGB LED'lerin kullanılması veya tüm sistem için tek bir güç kaynağının kullanılması vb. Bu 9V pille çalışan pervane yalnızca birkaç saat çalışır.
Kaynakları indir
İngilizce orijinal makale (site sitesi için Koltykov A.V. tarafından çevrilmiştir)
radyo elemanlarının listesi
| atama | Tip | mezhep | Miktar | Not | Mağaza | not defterim |
|---|---|---|---|---|---|---|
| mikrodenetleyici | PIC18F252 | 1 | not defterine | |||
| kayıt mandalı | SN74LS373 | 2 | 555IR22 | not defterine | ||
| Lineer Regülatör | LM7805 | 1 | not defterine | |||
| Fototransistör | 1 | not defterine | ||||
| elektrolitik kondansatör | 47uF | 1 | not defterine | |||
| direnç | 47 ohm | 1 | not defterine | |||
| direnç |
Bu videoda pervane adı verilen ilginç bir saat gösterilmektedir. Bunları yapmak üç akşam sürdü. Önceden, bu saat için iyi bir şema yoktu. Artık çok iyi, basit ve montajı kolay bir devre bulunduğuna göre tekrarlamak mümkün. Baskı devre kartlı dosyalar şemaya gider. Saat devresi basittir, baskılı devre kartları yapabilen ve denetleyiciyi flaşlayabilen acemi radyo amatörleri için erişilebilir.
Radyo bileşenleri bu Çin mağazasından ucuza satın alınabilir.
Saate neden pervane denir? Bu tasarım bir fan, yani bir bilgisayardan bir soğutucu tarafından döndürülür. Gördüğünüz gibi rotor üzerinde LED'li bir kontrol panosu var. Bir saat etkisi yaratırlar. LED'ler, belirli anlarda LED'leri aydınlatan mikroişlemciler tarafından kontrol edilir ve efekt, kadran boşluğundaki bir görüntüdür.
Video görüntüsü biraz titriyor ama bu sadece bir film efekti. Aslında, özellikle karanlıkta her şey çok parlak ve net bir şekilde parlıyor.
Video, zamanı doğru ayarlayabileceğinizi, LED'leri döndüren motoru kontrol edebileceğinizi gösteriyor.
Alışılmadık bir mekanizma ve çalışma prensibi ile çok güzel ve ilginç bir saat olduğu ortaya çıktı. Otomatik kurmalı saatler hakkında.
Sabit sürücüden motordaki saat pervanesi
Sabit sürücüden bir motorda olağandışı dinamik LED saat.
Saat pervanesi
Cihaz Şeması:

Şematik diyagram Fotoğraf: 1

Şematik diyagram Fotoğraf: 2

Şematik diyagram Fotoğraf: 3

Şematik diyagram Fotoğraf: 4
Pekala, tüm şüpheler bir kenara bırakıldığında, başlayabilirsiniz ...
Bir pervane saati yapmak için şunlara ihtiyacımız var:
* 2 yaprak fiberglas, biri çift taraflı(45*120mm) ve ikincisi tek taraflı(35*60mm).
* Demir ve ferrik klorür (aşındırma tahtaları için).
* HDD sürücüsünden motor.
* İnce uçlu, mini matkaplı havya.
izlemek için:
* Sürücü LED'i MBI5170CD(SOP16, 8 bit) - 4 adet.
* Gerçek zamanlı saat DS1307Z/ZN(SMD, SO8) - 1 adet.
* Mikrodenetleyici ATmega32-16AU (32K Flaş, TQFP44, 16MH) - 1 adet.
* Kuvars rezonatörler 16MHz - 1 adet.
* Kuvars rezonatörler 32kHz - 1 adet.
*Ker. kapasitör 100nF (0603 SMD) - 6 adet.
*Ker. kapasitör 22pF (0603 SMD) - 2 adet.
*Ker. kapasitör 10mF * 10v (0603 SMD) - 2 adet.
* Direnç 10kOm (0603 SMD) - 5 adet.
* Direnç 200Om (0603 SMD) - 1 adet.
* Direnç 270Om (0603 SMD) - 1 adet.
* Direnç 2kOm (0603 SMD) - 4 adet.
* Bunun için pili ve tutucuyu izleyin
* Kızılötesi LED
* Kızılötesi transistör
* LED'ler (0850) 33 adet (biri (sonuncusu) farklı renkte olabilir)
Motor sürücüsü için:
* TDA5140A motor sürücüsü - 1 adet.
* Lineer sabitleyici 78M05CDT - 1 adet.
* Kondansatör 100 mF polar (0603 SMD) - 1 adet.
*Ker. kapasitör 100 nF (0603 SMD) - 1 adet.
* Kondansatör 10 mF polar (0603 SMD) - 2 adet.
*Ker. kapasitör 10 nF (0603 SMD) - 1 adet.
*Ker. kapasitör 220 nF (0603 SMD) - 1 adet.
* 20 nF - 2 adet.
* Direnç 10 kOhm (0603 SMD) - 1 adet.
1) İlk önce 2 pano yapmamız gerekiyor.

PCB alttan görünüm

Devre kartı üstten görünüm
2) Motoru ondan çıkarmak için gereksiz eski bir sabit sürücü arıyoruz, bazı sabit sürücülerde motor cıvatalarla sabitlenmez, kasaya bastırılır, sabit sürücü seçerken buna dikkat edin, aksi takdirde kesmek lazım :)
İnternette meraklı zihne dinlenmeyen birçok tuhaf elektronik proje bulunabilir.
Ve "pervane saati" büyük Web'deki bir yenilik olmaktan uzak olsa da, bir saat devresinde stroboskopik etkiye sahip güzel bir anda tökezledim, geçemedim.
biraz teori
Cihazın ana fikri, hızla dönen bir taban üzerine monte edilmiş bir grup LED'in mikrodenetleyici kontrolüdür.
Kod, harici bir kesmeden tekrar eden bir döngü tanımlar. Diyelim ki toplam çoğuşmanın uzunluğu 15 ms. Bu süre boyunca, her LED n sayıda kez yanar. Düşük bir dönüş hızında, insan gözü aynı anda tüm LED'lerin yalnızca bir kez dahil edilmesini yakalayacaktır. Ancak, dönme sıklığını artırmaya değer ve ortak paketin küçük aralıkları X ekseni boyunca gerilmeye başlayacak ve göz şimdiden eşzamanlı olmayan tepkileri yakalamaya başlayacak. Bu, 15 ms'lik bir aralığın X ekseni boyunca belirli bir uzunluğa genişletileceği, ortak paket içindeki yanıp sönme aralıklarının zaten açıkça ayırt edilebileceği ve sayıların çekileceği belirli bir sınırlayıcı dönüş frekansına kadar devam edecektir. genel resme katkıda bulunacaktır. Dönme hızında daha fazla bir artış, darbelerin toplam patlamasının uzamasına yol açacak ve sayılar okunamaz hale gelecektir.
Kart, SMD bileşenleri için yeniden tasarlandı, çünkü kartın ağırlığı ne kadar küçükse fan üzerindeki yük o kadar az oluyor.
Dönen kısım, bir ana kart ve üzerine LED'lerin monte edildiği bir gösterge kartından oluşmaktadır.

Doğrultucu diyot olarak SS12 Schottky diyot kullandım. "Boşta başlatma" gerektiğinden, mikrodenetleyicinin altına 18 pimli bir soket lehimledim.
Kolun uzunluğu, ışıklı kısmın rahat gözlemlenmesi dikkate alınarak zevke göre ayarlanabilir. Bence 90-110 derecelik bir tarama en uygunudur. 90 dereceden az tarama seçeneği sayıları bir araya getirir ve 110 dereceden fazla ise görüntünün çapını çok fazla uzatır.
Başlangıçta 65 mm'lik bir omuz uzunluğu seçtim, ancak deneyim başarısız oldu ve bitmiş tahtayı 45 mm'ye kadar gördüm.
LED'li tahta böyle görünüyor.

7 ana LED ve 2 arka ışık LED'ine sahiptir. Tüm LED'ler 5 mm çapındadır.
İki kartın bağlantıları, bağlantı pedlerinin lehimlenmesiyle yapılır. Tahtaları kazıdım, montajı yaptım, birleştirdim. Şimdi onları fan rotoruna koymanız gerekiyor.
Bunu yapmak için 120 derecelik bir yayılma ile 3 delik açtım.

İçlerine 3 mm çapında ve 20 mm uzunluğunda havşa başlı vidalar yerleştirdim. Fındıklara sabitledim ve tahtaları onlara sabitledim.

İkincil sargının uçlarını tahtaya lehimleyin. Ekran kartının karşı tarafına, dönüş sırasında atmayı azaltmak için dengeleyici bir karşı ağırlık koydum.
Mikrodenetleyici olmadan boşta çalışma zamanı geldi. Rotoru panolarla birlikte fanın üzerine koydum ve RF jeneratörüne güç verdim, fan hala hareketsiz. Arka ışık LED'leri yanar. Girişteki voltajı kontrol ettim, 10 volta düştü, bu normal. Kızılötesi fotodiyot ve kızılötesi LED'den oluşan senkronize bir optokuplör kurmaya devam ediyor. IR LED'i fanın tabanına yapıştırdım ve ana +12 V güç kaynağından 470 Ohm'luk bir dirençle çalıştırdım. Tahtaya sıradan bir IR fotodiyodu lehimledim.
Dönme sırasında fotodiyot LED'in üzerinden mümkün olduğu kadar yakın uçacak şekilde optokuplörü kurdum.

programladım.
Denetleyiciyi sokete taktım, rotoru bir tespit halkasıyla sabitledim.

Başlatma zamanı!
İlk dahil etme ve aynı zamanda memnun ve üzgün. Devre çalıştı, LED'ler olması gerektiği gibi saat 12:00'yi verdi, ancak görüntü X ekseni boyunca bulanıktı, "bilgilendirmeye" başladım, sonuç olarak, değiştirilmesi gerektiği sonucuna vardım. fotodiyot. Operasyon alanının MK'nin harici kesintisinden yayılması çok büyük çıktı.
Daha dar bir radyasyon modeline sahip bir fotodiyot koymaya karar verdim ve ayrıca LED'i siyah elektrik bandıyla yapıştırdım.

Tepki alanı 2-3 kat azaldı ve sonraki dahil etme memnun etti: bulanıklık tamamen ortadan kalktı.
Düşük güçlü fanların bu tasarımı istenen hıza çıkarmayacağını ve görüntünün gözünüzde titreyeceğini tekrar not ediyorum. Projeyi üç kez yeniden düzenledim ve yalnızca 0,4 A parametreli fan seçeneği; 4,8 W; 3200 rpm harika çalıştı.
Tasarımın bariz bir dezavantajı, kontrolör için yedek pil olmamasıdır. Evet, evet, ana + 12V güç kesildiğinde zaman sıfırlanacaktır.